研究背景
近年,インターネットの拡大や無線通信の高速化により,制御系の設計において通信路を介した制御に関する研究が盛んになっている.[1]その応用範囲も工場内の産業用ロボットの遠隔制御や手術ロボットを用いた遠隔手術など多様である.
通信路を介した制御において解決すべき主要な問題として,通信容量の有限性がある.制御対象は無限の精度をもつ連続時間の信号で表されるのに対し,単位時間に通信路を介して送信できる情報には限りがある.考えなければならない問題は制御目的の達成のために信号の精細さ,伝送回数がどれだけ必要かということである,
先行研究では,量子化器を組み込んだ制御系を考えることによって,制御目標を達成しつつ信号の情報量を削減することで通信量の低減を行っている.[2,3].また,文献[4,5]では不確かさを持つプラントと制御器が有限の通信容量を持つ通信路を介して接続された場合において,量子化された入力を用いて安定化を達成する適応制御が提案されている..
また,伝送回数を減らすための試みとして,イベント駆動型制御が提案されている[6-8].これは,入出力情報の変化が十分小さい場合に信号のやり取りを止めることで通信量の削減を図る手法である.イベント駆動制御に関する研究としては,マルチエージェントシステムの平均合意問題[9,10]などがあるが,適応制御にそれを適用した研究は多くはない.
本研究ではイベントベースド制御の考え方を適応制御に適用することについて考える.特に今回は離散時間線形モデルにおいてアクチュエータと制御器の間に通信路を置いた場合を考え,制御器からアクチュエータへの入力信号の送信回数を低減することを目標とする.
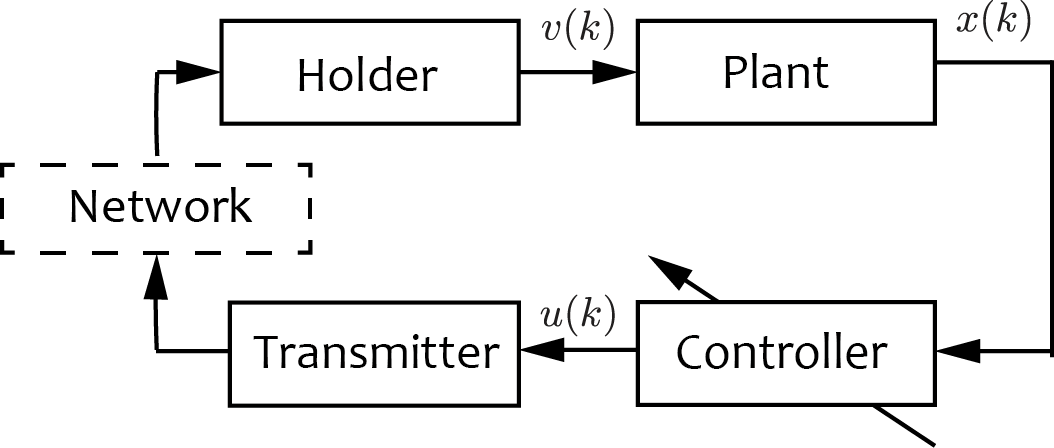 |
| 図1: 通信路を介した適応制御系 |
提案する制御則
イベント駆動制御とは,制御器からアクチュエータに送る入力信号の送信回数を低減するために,次のような仮定を置いている.
- 制御器から入力信号をアクチュエータに送信されなかった場合,アクチュエータはひとつ前の入力をそのまま用いる.
- 制御器は前回した入力信号の情報を保持する
制御器側は入力の変化が状態に比べて十分小さい場合,入力信号を送信しないという方法を用いることによって,通信量を低減することができる.
文献[11]で提案されている制御則を元にして不確かさを含むシステムに対して入力信号の送信回数を低減するような適応制御手法を提案し,文献[12]の定理を元に,提案した制御則が状態を漸近収束を達成することの数学的証明を行った.以下に実際の数値例を示す.図3にある入力の変化のプロットについては,破線で表した部分が入力の送信を行った時刻,青線が制御器側で構成した入力,赤線がアクチュエータからプラントに入れる入力を表している.
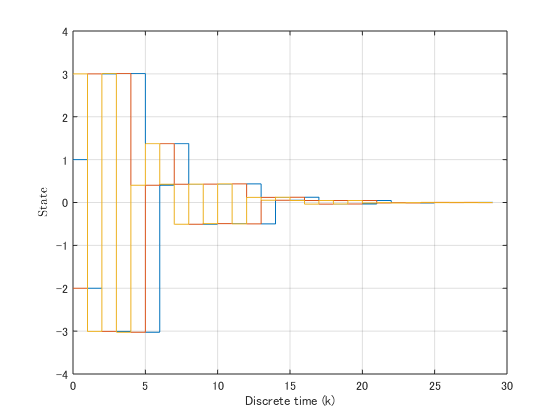 |
| 図2: 状態の変化 |
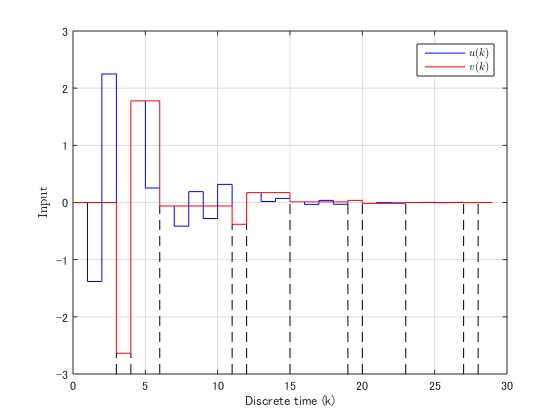 |
| 図3: 入力の変化 |
今後の目標
今回はアクチュエータと制御器の間に通信路をおいた場合を想定し,イベント駆動制御の観点から入力信号の送信回数を低減するような適応制御手法を提案した.しかし,実際の制御系においてはプラントの入力側だけではなく,センサー側に通信路をおいた場合も考えられる.
今後の目標は,そうした場合においても状態の漸近安定が達成できるような適応制御手法の考案,および連続系への拡張などが挙げられる.
参考文献
[1] L. Zhang, H. Gao, and O. Kaynak, "Network-induced constraints in networked control systems?a survey," Industrial Informatics, IEEE Transactions on, vol. 9, pp. 403-416, 2013.
[2] 津村 幸治, 石井 秀明, "量子化信号を含む制御系の設計・システム同定," 計測と制御, vol. 44, pp. 70-77, 2005.
[3] C. De Persis, A. Isidori, "Stabilizability by state feedback implies stabilizability by encoded state feedback," Systems & Control Letters, vol. 53, pp. 249-258, 2004.
[4] T. Hayakawa, H. Ishii, and K. Tsumura, "Adaptive quantized control for linear uncertain discrete-time systems," Automatica, vol. 45, pp. 692-700, 2009.
[5] T. Hayakawa, H. Ishii, and K. Tsumura, "Adaptive quantized control for nonlinear uncertain systems," Systems \& control letters, vol. 58, pp. 625-632, 2009.
[6] P. Tabuada, "Event-triggered real-time scheduling of stabilizing control tasks," Automatic Control, IEEE Transactions on, vol. 52, pp. 1680-1685, 2007.
[7] J. Lunze and, D. Lehmann, "A state-feedback approach to event-based control," Automatica, vol. 46, pp. 211-215, 2010.
[8] A. Eqtami, D. V. Dimarogonas, and K. J. Kyriakopoulos, "Event-triggered control for discrete-time systems," American Control Conference (ACC), 2010, pp. 4719--4724, 2010.
[9] E. Garcia, Y. Cao, and D. W. Casbeer, "Decentralized event-triggered consensus with general linear dynamics," Automatica, vol. 50, pp. 2633-2640, 2014.
[10] G. S. Seyboth, and D. V. Dimarogonas, and K. H. Johansson, "Event-based broadcasting for multi-agent average consensus," Automatica, vol. 49, pp. 245-252, 2013.
[11] T. Hayakawa, W. M. Haddad, and A. Leonessa, "A Lyapunov-based adaptive control framework for discrete-time non-linear systems with exogenous disturbances," International Journal of Control, vol. 77, pp. 250-263, 2004.
[12] H. K. Khalil, Nonlinear systems, Prentice hall, 1996.