- 適応制御器設計
- ニューラルネットワークコントロール
- 非線形力学系
- 確率システムと金融工学
- Lyapunovの安定理論
- コンパートメントシステム
適応制御器設計
コントロールを必要とする力学のシステムのますます複雑で高度に不確かな性質に照らして、多くの高機能の工学アプリケーションの信頼できるモデルが手に入らないであることは容易に想像できる。そのようなシステムの不確実性の下では、適応制御器はハイレベルのモデリングエラーを許容し、システムパフォーマンスを改善することができるので、その有効性は明らかである。
この研究では、パラメーターの不確実性、外乱 除去、飽和制約、ディジタル・インプリメンテーションを考慮した Lyapunov の手法に基づいた適応制御の枠組みを構築する。特に、次の研究トピックに取り組んでいる:外乱を備えた非線形の不確かなシステムに対する適応制御;非線形の不確かなシステム用のロバスト適応制御;アクチュエーターの飽和制約を備えた非線形の不確かなシステムに対する適応制御;状態依存の不確実性を備えた非線形の行列セカンドオーダー(メカニカル)システムの適応制御。
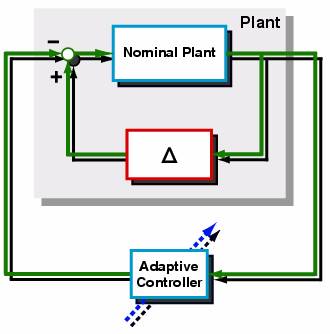
Block diagram of adaptive control system
ニューラルコントロールネットワーク
ニューラルネットワークへの大きな関心の理由のうちの1つは、単純な方法で相互に連結したシンプルで自律的なプロセスユニットの集合的なアクションから、ニューラルネットが連続・非線形関数を近似できる特性を持っていることである。さらに、ニューラルネットは、本質的に並列で高度に冗長な処理アーキテクチャーを有していることにより、アップデート則を可能にしているという点で注目を浴びている。従来のニューラルネットを用いた適応制御では、プラントの状態が平衡点近傍に収束することしか示されていなかったが、超安定性の理論を用いることにより、シンプルなアップデート則でプラントの軌道が平衡点に収束することを示した。
当研究室ではこのアップデート則のシンプル化により、より広範な理論展開が可能になり、より確かなシステムに対する適応制御の構築を図っている。
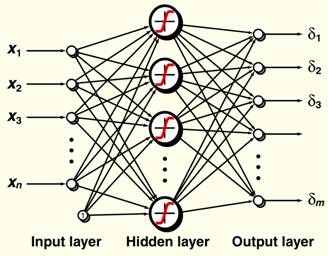
Single hidden-layer neural network
コンパートメントシステム
コンパートメントシステムモデルは、非負値の状態をとる質量・エネルギーバランスの考察から導出され、サブシステム(コンパートメント)間の非負量の交換を内包する。これらのモデルは工学及びライフサイエンスにおいて広範囲に存在し、システムバイオロジーの観点から統一的な枠組みを提示する。
本研究では特に生物学・生理学におけるコンパートメントシステムに焦点を当てる。生物・生理システムモデルは非線形で非常に不確かなパラメータを含んでいることが知られている。その不確かさは、個体間の差異のみならず、個体内の時間的変動にも起因する。そのような非線形で不確かなシステムに対しては適応制御を適用することが有効である。この研究では、第一にコンパートメントシステムに対する制御系の設計を考える。特に、本研究では非負入力の下でのセットポイントレギュレータを構築する。さらに、この制御系を薬理・薬物学システムに適用する。
この研究の第二の目標として、前段落で得られた知見を用いて、生体機構そのものにおける「適応」とは何か?の問いに答える。特に、システムバイオロジーの観点から、生物システムの(内的)適応機構の定式化に取り組み、生物学において新しいパラダイムを提示することを目標とする
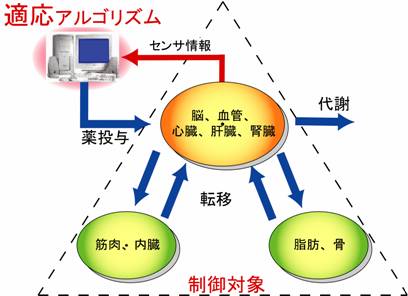
例: 麻酔薬投与システム