研究背景
近年,衛星測位システムの利用が拡大しその重要性が増しているため,世界各地で衛星測位システムの開発が行われており[1],そして現在日本ではGPS を補完,補強するシステムとして準天頂衛星システムの開発が行われている[2].補完とは利用地域の天頂付近に衛星を配置することによって利用可能な衛星数を増やすことであり,補強とはGPS からの信号と誤差を補正する信号とを組み合わせることで精度を高めることである[3].GPS の精度を高めるためには日本の天頂付近に衛星を配置することが必要となる.これは障害物や地形などにより衛星の信号が遮られ精度が劣化することを防ぐためである.準天頂衛星システムは,日本の上空に比較的長い時間留まる衛星を複数個用いることで,常に日本の上空に衛星を存在させるという目標を達成する[4].準天頂衛星が地表に描く軌跡は以下の図1のようになる.
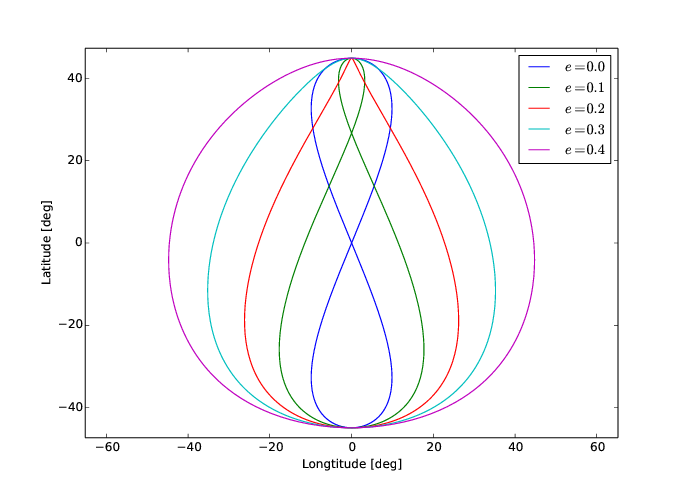 |
| 図1: 準天頂衛星が地表に描く軌跡 |
また,ミッション要求の高度化,複雑化に伴い,衛星のフォーメーションフライトや衛星コンステレーションに関する研究が数多く行われている[5,6].フォーメーションフライトのように複数の制御対象が互いに通信し他の制御対象の状態を利用し目的を達成する制御のことを協調制御という.
複数のエージェントに対しての協調制御の研究は,鳥の群れの動きを単純な法則によってあらわした研究[7]を契機として盛んに行われている.協調制御における代表的な問題には,被覆問題[8]やコンセンサス問題がある.コンセンサス問題とは,各エージェントの状態量の一部をある一つの値に収束させる問題である[9].コンセンサス問題の先行研究としては,加速度を自由に制御できるエージェントを制御してエージェント群の運動を一定値に収束させる研究[10]や動く目標を複数のエージェントで囲みながら追跡する制御則の研究[11]などが挙げられる.
本研究では準天頂衛星システムのように複数の衛星が楕円軌道上を周回する状況において,各衛星が他の衛星の状態を入力に利用して,一種のコンセンサスを達成するための制御則について考える.
研究目的
準天頂衛星システムにおいて,衛星が常時対象地域の天頂付近に留まるためには複数の衛星の間隔を適切に設定する必要がある.衛星の間隔とは衛星が地表のある点の上空を通過する時間の間隔とする.衛星間の配置の偏りを小さくするために,衛星の間隔を等間隔とすることを目標とする.本研究では衛星を目標の軌道に収束させ,地上に描く軌跡が全て同一となるようにし,さらに衛星の間隔を等しくすることを協調制御の枠組みで考える.
衛星の推進力としてはインパルス推力や[12]のような連続作動推力が用いられるが,本研究では連続作動推力を任意の方向に用いることができるとする.さらに衛星は制御に必要な状態量を観測するセンサーを備えており,他の衛星の状態を取得できるとする.複数衛星の等間隔配置制御については先行研究が存在する[12,13]が,これらの研究では目標とする軌道として円軌道を仮定している.そのため準天頂衛星システムのように楕円軌道を持つシステムには適用できない.本研究では先行研究の結果を拡張し,円軌道だけでなく楕円軌道にも適用できる制御則を構築することを目的とする.
提案する制御手法
衛星は既に目標の軌道面上にあるとする.それぞれの衛星の実際の軌道面は異なるが,軌道の離心率,近地点引数は同じであるため,すべての軌道面を2次元平面上に重ねて考えることができる.目標の軌道は楕円軌道であるが,まず円軌道における制御手法について説明する.衛星のダイナミクスを半径方向とそれに垂直な成分(角度)に分けて考える.半径方向には目標半径に収束するような入力を加え,角度方向には,前後に隣接する衛星の中間地点に向かうような入力を加える.すると,各衛星は等間隔に配置される.
次に,楕円軌道の場合について説明する.楕円運動を円運動に移すような変換を衛星の運動方程式に対して行い,変換後の座標系に先ほど述べた円軌道での制御則を適用し,最後に元の座標系に戻せば目標を達成することができる.以下にシミュレーション結果を示す.
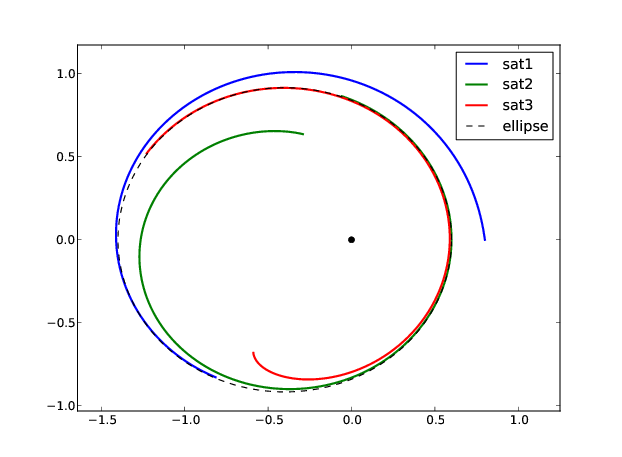 |
| 図2: 衛星の軌道(衛星数3) |
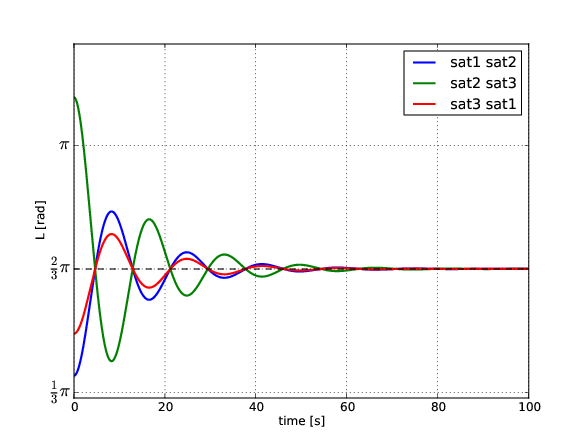 |
| 図3: 衛星の間隔 |
まとめと今後の課題
本研究では軌道面を固定した複数の衛星について,すべての衛星を円軌道または楕円軌道の目標軌道に収束させ,通過する時間の間隔を等しくする制御手法を構築した.そして,数値シミュレーションによって制御手法の有効性を確かめた.提案した手法には加えることのできる入力の方向や大きさに制限がないという仮定があるので,この仮定をより現実的な仮定に置き換えて考えることが今後の課題である.
参考文献
[1] J. M. Dow, R. Neilan, and C. Rizos, "The international GNSS service in a changing landscape of global navigation satellite systems," Journal of Geodesy, vol. 83, no. 3-4, pp. 191-198, 2009.
[2] JAXA 準天頂衛星システム(http://qzss.jaxa.jp/), .
[3] T. Tsujino, "Effectiveness of the quasi-zenith satellite system in ubiquitous positioning," Science & Technology Trends, Quarterly Review, no. 16, pp. 88-101, 2005.
[4] F. Wu, N. Kubo, and A. Yasuda, "Performance evaluation of GPS augmentation using quasi-zenith satellite system," IEEE Transactions on Aerospace and Electronic Systems, vol. 40, no. 4, pp. 1249-1260, 2004.
[5] 山田, 吉河, 島, 軸屋, "宇宙機フォーメーションの2インパルスによる相対位置の変更," 日本機械学会論文集(C編), vol. 72, no. 722, pp. 285-293, 2006.
[6] H. Umehara, "Potential-Function Guidance Forming Eccentricity Separation of Satellites with Continuous Thrust," Transactions of the Japan Society for Aeronautical and Space Sciences, vol. 44, no. 144, pp. 127-129, 2001.
[7] C. W. Reynolds, "Flocks, herds and schools: A distributed behavioral model," Computer Graphics, vol. 21, no. 4, pp. 25-34, 1987.
[8] J. Cortes, S. Martinez, T. Karatas, and F. Bullo, "Coverage control for mobile sensing networks," IEEE Transactions on Robotics and Automation, vol. 20, no. 2, pp. 243-255, 2004.
[9] 早川, 藤田, "マルチエージェントシステムとビークルフォーメーション," 計測と制御, vol. 46, no. 11, pp. 823-828, 2007.
[10] H. G. Tanner, A. Jadbabaie, and G. J. Pappas, "Stable flocking of mobile agents, Part I: Fixed topology," Proc. of IEEE Conference on Decision and Control, vol. 2, pp. 2010-2015, 2003.
[11] T-H. Kim, and T. Sugie, "Cooperative control for target-capturing task based on a cyclic pursuit strategy," Automatica, vol. 43, no. 8, pp. 1426-1431, 2007.
[12] C. R. McInnes, "Autonomous ring formation for a planar constellation of satellites," Journal of Guidance, Control, and Dynamics, vol. 18, no. 5, pp. 1215-1217, 1995.
[13] 加藤, "準天頂衛星の協調制御に関する研究," 東京工業大学修士論文, 2011.