研究背景と目的
自動車利用量が多い都市部において,慢性的に起こる交通渋滞やそれによって引き起こされる交通事故は大きな社会問題となっている.渋滞によってもたらされる損害は個人の時間的損失のみならず,それに関連する巨額の経済的損失,排気ガスによる環境汚染にもつながっており,多岐にわたって社会に害をなしている.道路の混雑は道路の本数を増やすことで解決できるほど単純な問題ではなく,混雑を減少させドライバーの移動時間短縮を見込んでつくられた新たな道路が逆に交通事情を悪化させるという報告もある[1].また道路建設には巨額の費用がかかるうえ,渋滞が問題となっている都市部では新たに道路を増やすための土地も不足している.本研究では,渋滞が発生すつメカニズムを解析し,その抑制手法を構築することを目的としている.まず,シンプルな交通網上において,自動車交通流をモデル化し,混雑や渋滞の発生条件を考察する.その後,導出された条件をもとに渋滞の抑制手法を構築していく.
先行研究
交通信号制御
交通信号は赤,青,黄などの状態を周期的に示すことで交通流を制御している.一般的に信号制御では,信号現示が一巡する周期であるサイクル長,サイクル長に対する各現示の青信号時間の割合であるスプリット,同一方向の交通流に対する,基準交差点との青信号開始時刻のずれであるオフセットの3つのパラメータを制御量としている.青信号を1,赤信号を0のように信号機の状態を離散変数で置き,制御量として扱うケースも存在する[2].交差点は複数の信号機で構成されており,信号表示の組み合わせで様々な現示を表す.
オフセット制御
交通制御では車両移動時間の最小化を目標としており,車両移動時間とは走行時間と,信号機での停車待ち時間の足し合わせである.オフセットの制御基準にはスルーバンド最大化と待ち時間最小化の2種類が存在する[3].前者におけるスルーバンドとは自動車が信号機に妨げられずに走りぬけることができる時間の帯のことで,簡単に解を求められるという利点を持つが,スルーバンドと実際の交通効率との間に関係性が存在するかは不明である.そのため,求められた解は待ち時間や停止回数を最小化するものではない.スルーバンドを大きくするためには,隣接し合う信号機が協調して青信号を表示する必要があり,青信号が隣接する車両進行方向の信号へと伝播していく様子をグリーンウェーブと呼ぶ.文献[4]では,一台の車が,二次元正方格子状の道路を赤信号を避けながら,より遠くへ進んで行ったときの経路を調べており,各交差点に存在する信号機をそれぞれ同期させるように動かしたときと,全く独立に動かしたときとの経路の違いを調べている.後者の待ち時間とは信号待ちを強いられる全ての車の停車時間の合計値である.この方法はスルーバンド最適化手法に比べ,最小化したい値である待ち時間を直接扱っているため効率の良い解を得ることができるが,非線形最適化問題となるため解を求めることは難しい.
集中制御と分散制御
現代の都市街路網では,各交差点に設置された多数の信号機を専用回線で中央コンピュータに接続し,集中制御することで交通規制を図っている.交通量調査などで,あらかじめ想定した複数の交通状況に対して,最大10程度の信号機表示パラメータを算出しておき,実際の制御時には曜日,時刻によって信号機表示パラメータを選択する,パラメータパターン選択方式が主に使われている.この制御方式には複数の問題点があり,信号機表示パラメータの設計やそのパラメータを時間で変更するといった経験的予測に対する負担が大きいものになっていしまうこと,信号機表示パラメータは交通状況にリアルタイムには対応していないため,各交差点において無駄な待ち時間が発生してしまうことがあげられる.これに対し,自律性を持たせた信号機を局所的に交通情報を共有しつつ分散配置することで,相互作用による同期制御が可能となる方式も提案されている[5-8].これを分散制御と言い,制御計算に必要な情報,計算量がともに少なく,道路網の大規模化にも対応可能である.分散制御方式では各交差点近傍の局所的な領域において,交通量の待ち時間を最小化する制御を実現するが,系全体の待ち時間を最小化する保証はない.
分散制御方式の先行研究として,信号機もしくは信号機の集まりとみなした交差点を非線形振動子モデルとした手法[5-8]が存在する.それらの多くはKuramoto振動子を変形させた結合振動子系であることが多い.文献[5-8]では信号または交差点の周期的な状態量の変化を振動子の位相変化としており,隣接する振動子同士の連結により振動子全体の同期を実現するため,振動子の位相ダイナミクスに隣接する振動子との相互作用項を加えたものが同期を考慮したダイナミクスになっている.文献[5]ではオフセットにのみ焦点をあて,その制御しか実現できていないが,ニューラルネットワークを用いた振動子の信号機への適用を試みている.文献[6,7]は,振動子同士の位相同期により,すべての交差点においてサイクル長は等しい値となる.スプリットは東西・南北交通量の比によって目標値が決まり,信号現示1サイクルごとに目標値に向かってスプリットの値が更新される.また,主要進行方向を定めており,各交差点のオフセットの目標値は,主要方向道路における自交差点と隣接する交差点との距離を車両速度で割ったものとなっている.各交差点ごとに目標オフセットに対応した固有振動数の目標値が求められており,信号現示1サイクルごとに目標値に向かって,固有信号数の値が更新される.つまり,文献[6,7]は,スプリットとオフセットの制御を目的としている.文献[8]では[6,7]と同様にサイクル長は振動子全体で等しいものになることに加え,振動子の現示1サイクルで交差点の待ち車両すべてを解消できる最小のサイクル長が求められている.各交差点ごとに求められた最少サイクル長の中で最も大きいものに,各交差点のサイクル長の極限値は一致する.スプリットは各方向流入交通量の比で決まり,オフセットは独自に定めた,オフセットに関する待ち時間関数の最小化問題を,各交差点ごとに数値的に解くことによって求められる.文献[8]では,サイクル長の制御を主題においている.文献[9]ではサイクル長,スプリット,オフセット3つ全ての同時制御を,グラフ上の反応拡散方程式により振動子を設計することにより実現している.信号機が不規則に配置された幹線道路を,異なる速度の車両が通行する状況で,すべての車両が塊となって動くよう,信号機のサイクル長を変化させることによる制御は文献[10]で行われている.
文献[8]では交差点の利用容量を超えると1サイクルで待ち車両を解消することができないため,最小サイクル長は無限大に大きいものとなってしまい,その交差点は閉鎖されてしまう.閉鎖されないためには最大のサイクル長を設定しておけばよいのだが,1サイクルで解消しきれなかった待ち車両は最大サイクル長から変化した大きいサイクル長で次の青信号を待つのでかなりの待ち時間を要することになる.系のサイズが大きくなればなるほど,最終的にすべての振動子が収束する最小サイクル長は大きなものになっていくので,各交差点での待ち時間は必然的に長くなってしまう.文献[5-9]に言えることだが,センサの故障などにより交通流量がわからない区間が存在する場合,その区間にオフセットのしわ寄せがいきそこを通過する車両の旅行時間が延び,結果としてエリア全体の円滑な交通が阻害されることになる.また,交通量の変化に対応した交通信号網の自律分散制御を試みているが,その交通効率はあまりよくない.
マルチエージェントモデルを用いた信号機のモデル化に関する研究も広く進められている.マルチーエージェントシステムとは,局所的な情報のみを用いて自律的に制御パラメータ変更するエージェントを組み合わせることで,大域的に効率の良い動作を実現するシステムである.文献[11]では,二通りのモデル化を行っており,一方はエージェントが下層エージェント,複数の下層エージェントを統括する中間層エージェント,中間層エージェントを統括する上層エージェントの3つに階層分けされており,各階層のエージェントの知覚できる情報,役割は異なる.他方はエージェント間に階級は存在せず,隣接するエージェントは互いに情報を交換し合い,各々が交通流をスムーズに通過させるよう信号機制御をおこなう.
自己組織化を用いて,信号機の自律分散制御を実現しようという試みもなされている[12-14].交差点に到着する車両台数の短期予測[12]をもとに,交通量がさほど多くないときは,交差点における車両待ち時間の合計値を最小化する制御方針を採用している[13].また,車両飽和時は出発待ち車両台数を最小化する制御方針を用いる[14]ことで,交差点が先詰まり状態になるのを防ぎつつも,交通効率の向上を実現している.
非線形結合振動子モデル
互いに相互作用する非線形結合振動子モデルではKuramotoモデル[15]がよく知られており,文献[5-8]においても隣接する振動子同士の相互作用を考慮した位相振動子モデルとしてこれに似たものを用いている.ここでKuramotoモデルについて説明する.1次元の状態量を持つ単純なモデルであり,個々の振動子の出力振動数は固有振動数に,自分以外のすべての振動子との相互作用項を足し合わせた形になっている.相互作用項の影響の大きさは,結合強度であるカップリングゲインの値によって特徴づけられ,この値を変化させることである程度望ましい同期を実現することができる.同期とは,個々の振動子が持つ出力振動子の値の差が零に収束することであり,収束の仕方もカップリングゲインの値によって変化する.文献[16]ではKuramotoモデルの指数的収束,および収束位相差の幅を任意のものに絞り込むカップリングゲインが導出されており,同期するための位相差の初期条件は収束位相差の値によって影響を受けない.文献[17]では,各振動子の固有振動数がすべて等しいKuramoto identicalモデルの位相同期条件を,振動子の数に依存しない形で求めている.
Kuramotoモデルを変化させた結合振動子モデルの研究も盛んに行われている[18-20].文献[18]では多次元の状態ベクトルを持つモデルを使用しており,隣接する振動子同士の相互作用のみを考えている.またカップリングゲインもKuramotoモデルとは異なり相互作用する振動子ペアごとに違うもの,具体的には振動子間の距離に関係したカップリングゲインを用いており,同期はベクトルの要素ごとに起きる.もちろんある要素が同期している振動子間でも,ほかの要素は同期していない可能性がある.すべての振動子が同期するわけではなく,同期するグループと同期しないグループに分けられる.文献[19]では,リング状に配置された振動子が,隣り合う振動子のみ互いに相互作用しあう状況で,同期するための各振動子の初期位相差,およびカップリングゲインの条件を求めている.隣接振動子のみ相互に作用しているので,文献[19]の結合振動振動子モデルは,改良を加えることで自律分散的な交通信号モデルとして適応できるかもしれない.文献[20]ではKuramotoモデルにグラフ理論を導入しており,完全結合でない結合振動子系に対する同期を取り扱っている.
交通流モデル
交通流のモデル化については,流体モデル,追従モデルなどさまざまな角度から研究が進められている.流体モデルは,交通流を連続的な流体として考え,密度,速度,流量などの巨視的量の間の関係式を基にしている.文献[21]では,道路をある一定区間ごとに区切り,それぞれの区間ごとに車両密度,車両速度,流出・流入交通量を定義している.文献[22]では,交通密度の時間変化として交通流を定義しており,ドライバーによるリアクション動作の遅れに関する,交通渋滞発生条件を導出している.追従モデルでは,前を走る車輌との車間距離や相対速度に応じて加減速をする,個々の自動車の挙動を表現する際に運動方程式を用いる.文献[23]では,追従モデルとセルオートマトンモデルを組み合わせた交通流を,ハイブリットモデルとして記述している.車間距離適応走行制御システムを採用した自動制御交通流を追従モデルで,手動制御交通流をセルオートマトンモデルで記述しており,それら二つを組み合わせ自動制御・手動制御,二つの制御方式の車両が混在する交通流を実現している.セルオートマトンとは,非常に単純化された離散的計算モデルであり,これを用いて交通流をモデル化する研究も広く行われている[24-26].もっとも単純なモデルがルール184モデルと言われているものであり,ほかのセルオートマトンモデルはすべてこのモデルの拡張である.文献[24]では,1次元の拡張された交通流のCAの構築と,その性能評価が行われており,ルール184モデルに比べ,確率的要素や加減速の要素が盛り込まれている.文献[25]では,2次元セルオートマトンモデルを提案している.文献[27]では,片側2車線(走行車線,追い越し車線)の双方向交通高速道路における,セルオートマトンを用いた交通流モデルを提案している.通常車両のみならず,1台で3セル分の幅をとり,走行速度も通常車両よりも遅い大型車両の存在も考慮に入れており,より実際の交通状況に近いモデルとなっている.
文献[28]では,単一リンクを通過する交通流モデルを,線形方程式を用いて記述している.このモデルでは,リンクから流出する交通量のうち,一定量がもとのリンクに再流入するフィードバック構造をとっており,リンクに流入する交通量が時間によらず一定量であった場合,車両がリンクを通過する時間は平衡点に収束することが示されている.
交通流モデルは,道路内の交通密度や交通流量という非負の値を用いて書き表されていることが多い.ネットワーク上におけるモノの流れなどを表すシステムの代表例として,コンパートメントシステム[29]が存在する.状態量は常に非負値を取り続け,システム内を流れる状態量の保存則が成り立つシステムの総称である.文献[30]では,様々なコンパートメントシステムに対して数学的解析が行われており,周期解をもつシステムなどの紹介がなされている.文献[31]では,閉じたコンパートメントシステムに対して,状態フィードバックコントローラを取り付けることで,ネットワーク内の混雑を自動的に解消できることを示している.
交通流とカオス
複数の信号機が存在する一方通行の道路において,信号機のパラメータを変化させることによって,各信号機間を通過するのにかかる車両の移動時間が周期的またはカオス的になることが確認されている.文献[32]では,1台の車両の各信号機間での移動時間を考えており,サイクル長と車両の加速度を変化させることによって,移動時間にカオス的現象がみられる.文献[33]でも同様に,車両1台が移動する際の各信号機間の通過時間を扱っているが,サイクル長およびオフセットを変化させることによって,カオス的現象を確認している.文献[34]では,2台の車両がお互いに追い越したり、追い越されたりして先後を争いながら進んでいく状況での,各信号機間での移動時間を考えており,サイクル長とお互いが追い越しあうときの加速度を変化させることによって,各信号機間の移動時間にカオス的現象がみられることを示している.文献[35]では,1台の車両の各信号機間での移動時間を考えており,隣接交差点間の同一方向青信号開始時間の差であるオフセットを,ロジスティック写像によって決めることで,車両が各信号間を移動する時間にカオス的現象がみられることが報告されている.文献[36]では,ループ状の道路において,各車両が前を走る車両に追従する交通流モデルを,差分方程式で記述している.ここで,車両台数を2台に限定した場合,各車両速度にカオス的振る舞いが生じることが確認されている.文献[37]では,異なる最高速度で走る各車両が、互いの距離によってその走行速度を変化させるとき,各車両の速度の速度と前を走る車両との車間距離はカオス的な振る舞いを示すことが確認されている.
交通流がカオス的振る舞いを持つことは,不安定性および非予測性から実際の交通状況としては望ましくない.こうした状況を回避するために,信号機制御によって交通流のカオス的振る舞いを抑制する研究も行われている[38,39].文献[38]では,ロジスティック写像によって表された交通流のカオス的振る舞いを抑え込む交通信号制御手法が考案されている.文献[39]では,セルオートマトンを用いて表現された二次元交通流モデルの東西・南北それぞれの平均速度が,カオス的振る舞いを持つことを制御することで,平均速度が0(すなわち渋滞状態)になることを防いでいる.
交通効率向上と最適化問題
交通効率の向上と道路を設計するうえでの車両進行方向の決定には深い関わりがある.文献[40]では,交通網における各道路の車両進行方向の最適化を行っている.各道路の車両進行方向を変数とした,飽和交通量に対する道路交通量,つまり道路の利用率を目的関数としており,その最小化を行うことにより,車両進行方向の最適化を行っている.
交通網が既知の状態で,信号機の最適パラメータを,最適化問題を解くことによって導出している研究も数多く存在する[41-45].文献[41]では,単独交差点の最適サイクル長と最適スプリットを,線形計画問題を解くことにより導出している.目的関数を、交差点における信号現示1サイクルあたりの平均車両停車時間としており、それの最小化を目標としている.文献[42]でも,同じく単独交差点のサイクル長およびスプリットの最適化を行っているが,停車時間のみならず,ガソリン消費・排出量も目標関数に組み込まれている.文献[43]では,複数交差点を扱っており,各交差点をつなぐリンクにおける車両の停車台数の合計値を目的関数としている.そして,非線形計画問題を解くことにより,各交差点の最適なサイクル長,スプリット,オフセットを導出している.複数交差点に対して,信号制御パラメータのみならず,信号現示を含めた交通制御の最適化を行う研究も存在する[44].オフセットおよび信号現示の関数として記述されたスルーバンドの最大化を目的としており,混合整数計画問題解くことで,それらの最適解を求めている.文献[45]では,車両のみならず歩行者・自転車の信号待ち時間も目的関数としており,それらを最小化する最適交通信号制御パラメータを,線形計画問題を解くことにより導出している.文献[46]では,車両平均停車時間,停車回数,交通利用量から成る目的関数の最小化を,交通信号制御パラメータを適切な値にすることにより実現している.このとき,交通信号制御パラメータの最適値を求めるアルゴリズムには,アントコロニーアルゴリズムが用いられているおり,数値シミュレーションによって,遺伝的アルゴリズムおよびウェブスターのアルゴリズムとの比較がなされ,有効性が確認されている.現在,どの時刻においてサイクル長,スプリット,オフセットを変化させるかは,実際の交通状況の統計データから,交通工学者が事前に判断し決めており,彼らにかかる負担は大きく,実際に決められた値も経験的要素に大きく左右されている.この作業の自動高精度化に関する研究が文献[47]で行われている.
交通網と信号機制御パラメータが既知の状態での,車両移動時間の最小化に着目している研究も存在する[48].経路選択および出発時間の最適化を目的としており,緊急避難や緊急車両の走行に適用することができる.文献[49]では,ある地点から目的地まで複数の経路が存在し,どの経路にも信号機が存在しないという状況で,各車両の目的地到達時間の最小化を図っている.具体的には,エージェントである各車両に,走行道路とその隣接道路の交通情報を与えることで,目的地までの最適経路を選択させ,各車両の目的地到達時間の最小化が実現されることを示している.
交通事故状況分析
多発する交通事故を減少させるため,どのようにして交通事故発生状況の解析に重点を置いた研究もおこなわれている.文献[50]では,通常走行車線,追い越し車線の2車線高速道路において,追い越しを行うための車線変更時の事故発生状況の解析を行っている.
グリッドロック
交通需要があるエリアに集中した場合,異なる方向に進もうとしている車両同士がお互いに進行を妨げてしまい,身動きが取れない状況に陥る,グリッドロックという現象が起こることがある.グリッドロックは,その発生により連鎖的に周囲の交通網にグリッドロックを発生させる特徴を持ち,ネットワーク全体の機能を停止させかねない.このような現象を回避するため,グリッドロックの発生メカニズムを解析し,その抑制に役立てようと試みている研究が存在する[51,52].文献[51]では,二つのリンクを組み合わせた簡易ネットワークにおいて,システムへの流入出交通量が存在しない状況での交通密度の変化とグリッドロックの発生について分析が進められている.文献[52]では,システムへの流入出交通量が存在する状況での,交通密度の変化とグリッドロック発生の関係が解析されており,流入出量を調節することにより,混雑・自由流状態がヒステリシスループ的に繰り返されることも確認されている.文献[53]では,流出入口が一定距離おきに存在する環状高速道路において流出交通量を一定としたとき,流入交通量を変化させることによる道路内平均交通密度の変化を分析している.また,道路の混雑状況によって,ドライバーが適応的に高速道路に留まるか,降りるかを判断する状況に関しても,合わせて平均交通密度変化に関する分析を行っている.
環状ネットワークを持つシステム
交通道路とその道を通過する車両を表すシステムは典型的な環状ネットワークを持つシステムである.交通のみならず環状ネットワークを対象とする研究は広く行われており,その代表的なものとして生体システムが挙げられる.文献[54,55]では,遺伝子制御ネットワークにおける周期解の存在条件が解析的に導出されている.
研究のアプローチ
本研究では,図1で表される互いに接する環状道路によって構成される交通ネットワーク(リングモデル)において,交通量調査によって実際に得られた交通流量と交通密度の関係を用いて交通流を数理モデル化し,システムの平衡点の安定性および分岐解析を通じて混雑や渋滞が発生する条件の解析を行う.ここで,混雑とは車両の台数が多く,スムーズに各車両が進行できない状態を,渋滞とは車両の台数が多すぎて,各車両が全く進行できない状態を指す.本交通流モデルでは,混雑状況によって進行方向を変更するといったドライバーの運転経路選択も考慮に入れられており,具体的には混雑箇所に向かう集団同調モデル,および混雑を避ける混雑回避モデルの二つを考える.
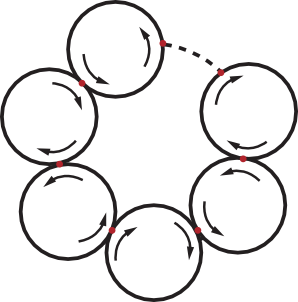 |
| 図1: n Ring Model |
結果と今後の課題
リアプノフ関数を用いることで,リングの数が3つの場合のリングモデルにおいて,ドライバーが混雑回避的志向を持つとき,混雑が起こりうる条件を解析的に求めたまた,混雑が起こらない場合,システムはロトカボルテラ方程式[56]のような保存系となり,交通密度の時間変化がゼロとなるシステムの平衡点の不安定性,およびポアンカレベンディクソンの定理[57]より,各リングにおける交通密度の時間変化は周期的であることが確認できた.図2,3はそれぞれ,各リングの交通密度の周期的な移り変わり,および初期的にはどのリングにおいても混雑が起こっていないにもかかわらず,最終的には何れかのリングにおいて混雑状態に陥る場合での,各リングにおける交通密度の時間変化を表している.ここで,図2,3の横軸はリング1の交通密度,縦軸はリング2の交通密度を表す.
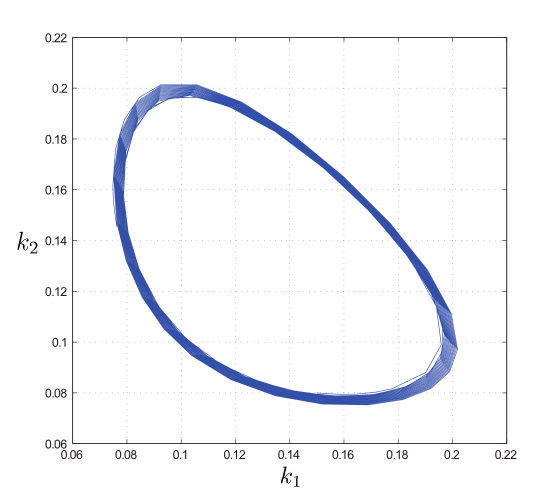 |
| 図2: Periodic trajectory of traffic densities |
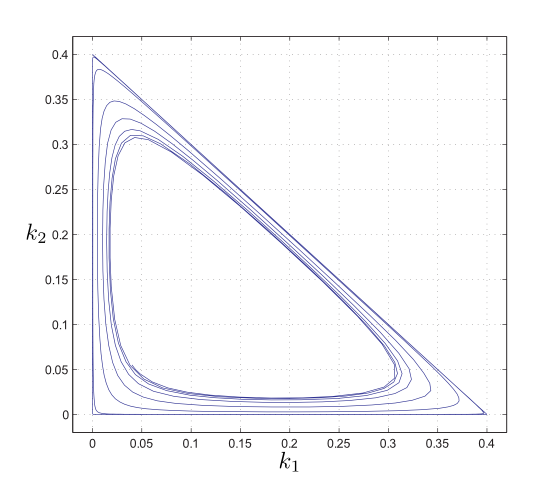 |
| 図3: Congested trajectory of traffic densities |
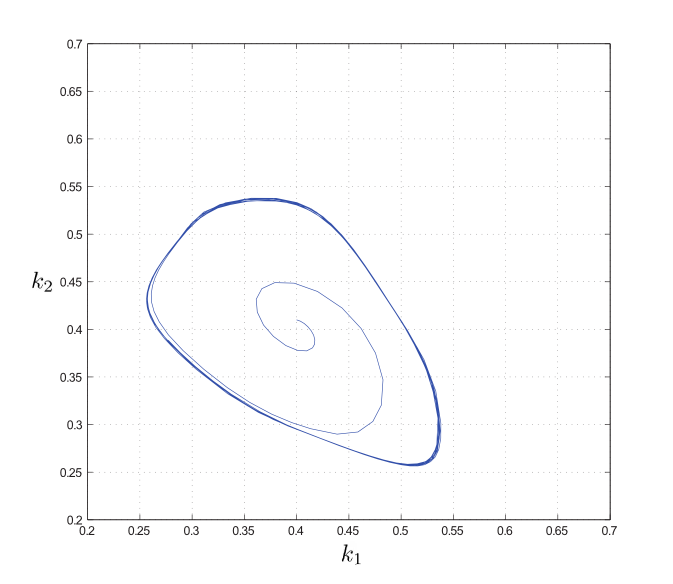 |
| 図4: Limit cycle |
参考文献
[1] D. Braess, A. Nagurney, and T. Wakolbinger, "On a paradox of traffic planning," Transp. Sci., vol. 39, no. 4, pp. 446-450, 2005.
[2] Y.-W. Kim, T. Kato, S. Okuma, and T. Narikiyo, "Traffic network control based on hybrid dynamical system modeling and mixed integer nonlinear programming with convexity analysis," IEEE Trans. Syst., Man, Cybern. A, Syst. Humans, vol. 38, no. 2, pp. 346-357, 2008.
[3] 河上省吾,松井寛,"交通工学,"森北出版,2004.
[4] T. Nagatani, "Green-light paths in city traffic controlled by signals," Physics Letters A, vol. 373, no. , pp. 536-539, 2009.
[5] 西川郁子, "振動同期を用いた交通信号制御法について," システム制御情報学会誌, vol. 52, no. 4, pp. 163-168, 2008.
[6] K. Sekiyama, J. Nakanishi, I. Takagawa, T. Higashi, and T. Fukuda, "Self-organizing control of urban traffic signal network," in Proc. IEEE Int. Conf. Syst. Man Cybern., vol. , no. , pp. 2481-2486, 2001.
[7] A. Akbas and M. Ergun, "Dynamic traffic control using a nonlinear coupled oscillators approach," Canadian Journal of Civil Engineering, vol. 32, no. , pp. 430-441, 2005.
[8] S. Lammer, H. Kori, K. Peters, and D. Helbing, "Decentralised control of material or traffic flows in networks using phase-synchronisation," Physica A, vol. 363, no. , pp. 39-47, 2006.
[9] 杉正夫, 湯浅秀男,新井民夫, "グラフ上の反応拡散方程式による交通信号網の自律分散制御," 計測自動制御学会論文集, vol. 39, no. 1, pp. 51-58, 2003.
[10] T. Nagatani, "Control of vehicular traffic through a sequence of traffic lights positioned with disordered interval," Physica A, vol. 368, no. , pp. 560-566, 2006.
[11] P. G. Balaji and D. Srinivasan, "Multi-agent system in urban traffic signal control," Computational Intelligence Magazine, vol. 5, no. 4, pp. 43-51, 2010.
[12] S. Lammer, R. Donner, and D. Helbing, "Anticipative control of switched queueing systems," The European Physical Journal B, vol. 63, no. 3, pp. 341-347, 2007.
[13] S. Lammer and D. Helbing, "Self-control of traffic lights and vehicle flows in urban road networks," Journal of Statistical Mechanics: Theory and Experiment, vol. P04019, no. , pp. , 2008.
[14] S. Lammer and D. Helbing, "Self-stabilizing decentralized signal control of realistic, saturated network traffic," Santa Fe Institute, Santa Fe, NM, Tech. Rep., vol. 10-09-019, no. , pp. , 2010.
[15] , "Chemical Oscillations, Waves, and Turbulence.," Springer-Verlag, vol. , no. , pp. , 1984.
[16] N. Chopra and M. W. Spong, "On exponential synchronization of kuramoto oscillators," IEEE Transactions on Automatic Control, vol. 54, no. 2, pp. 353-357, 2009.
[17] S. -Y. Ha, T. Ha, and J. -H. Kim, "On the complete synchronization of the Kuramoto phase model," Physica D, vol. 239, no. , pp. 1692-1700, 2010.
[18] M. N. Kuperman and D. H. Zanette, "Synchronization of multi-phase oscillators:an Axelrod-inspired model," The European Physical Journal B, vol. 70, no. , pp. 243-248, 2009.
[19] H. F. El-Nashar and H. A. Cerdeira, "Determination of the critical coupling for oscillators in a ring," Chaos, vol. 19, no. 033127, pp. , 2009.
[20] A. Jadbabaie, N. Motee, and M. Barahona, "On the stability of the kuramoto model of coupled nonlinear oscillators," Proc. Amer. Contr. Conf., vol. , no. , pp. 4296-4301, July 2004.
[21] J. Wang and R. Rajamani, "Should Adaptive Cruise-Control Systems be Designedto Maintain a Constant Time Gap Between Vehicles?," IEEE Trans. Veh. Tech., vol. 53, no. 5, pp. 1480-1490, 2004.
[22] L. Yu, T. Li, and Z.-K. Shi, "Density waves in a traffic flow model with reaction-time delay," Physica A, vol. , no. 389, pp. 2607-2616, 2010.
[23] Y. - M. Yuan, R. Jiang, M. - B. Hu, Q, - S, Wu, and R, Wang, "Traffic flow characteristics in a mixed traffic system consisting of ACCvehicles and manual vehicles: A hybrid modelling approach," Physica A, vol. 388, no. , pp. 2483-2491, 2009.
[24] Q. -L. Li, B. -H. Wang, and M. -R. Liu, "An improved automaton traffic model considering gap-dependent delay probability," Physica A, vol. 390, no. , pp. 1356-1362, 2011.
[25] M. Fukui and Y. Ishibashi, "Two-dimensional city traffic model with periodically placed blocks," Physica A, vol. 389, no. , pp. 3613-3618, 2010.
[26] T. Nagatani, "Traffic states and fndamental diagram in cellular automaton model of vehicular traffic controlled by signals," Physica A, vol. 389, no. , pp. 1673-1681, 2009.
[27] Q. Y.-Sheng, L. W.-Jun, Z. J.-Wei, W. Min, D. J.-Wei, and G. X.-Ping, "Cellular Automaton Models of Highway Traffic Flow Considering Lane-Control and Speed-Control," Communications in Theoretical Physics, vol. 56, no. 4, pp. 785-790, 2011.
[28] M. McCatney, "A trip time model for traffic flow on a semi-closed loop," Mathematical and ComputerModelling, vol. 52, no. , pp. 902-917, 2010.
[29] R. Brown, "Compartmental system analysis: State of the art," IEEE Transp. Biomed. Eng., vol. BME-27, no. , pp. 1-11, 1980.
[30] J. A. Jacquez and C. P. Simon, "Qualitative theory of compartmental systems," SIAM Review, vol. 35, no. 1, pp. 43-79, 1993.
[31] G. Bastin and V. Guffens, "Congestion control in compartmental network systems," Systems & Control Letters, vol. 55, no. 8, pp. 689-696, 2006.
[32] T. Nagatani, "Chaos and dynamical transition of a single vehicle induced by traffic light and speed up," Physica A, vol. 348, no. , pp. 561-571, 2005.
[33] B. A. Toledo, V. Munoz, J. Rogan, and C. Tenreiro, "Modeling traffc through a sequence of traffc lights," Physical Review E, vol. 70, no. 016107, pp. , 2004.
[34] T. Nagatani, "Chaotic and periodic motions of two competing vehicles controlled by traffic light," Physica A, vol. 25, no. , pp. 245-253, 2005.
[35] T. Nagatani, "Vehicular motion through a sequence of traffic lights controlled by logistic map," Phys. Lett. A, vol. 372, no. , pp. 5887-5890, 2008.
[36] M. McCatney, H. Mooney, and C. Stretch, "Investigation of a traffic modelling inspired two dimensional map," Commun Nonlinear Sci Numer Simulat, vol. 15, no. , pp. 2445-2455, 2010.
[37] D. Y. Z. Hou, H. Yuan, and X. Yin, "Research on Chaos Characters of Velocity in Traffic Flow," International Conference on Optoelectronics and Image Processing, vol. , no. 337, pp. 205-211, 2010.
[38] S. - C. Lo and H. -J. Cho, "Chaos and control of discrete dynamic traffic model," Journal of the Franklin Institute, vol. 342, no. , pp. 839-851, 2005.
[39] E. M. Shahverdiev and S. Tadaki, "Instability control in two dimensional traffic flow model," Physics Letter A, vol. 256, no. , pp. 55-58, 1999.
[40] S. Feng, H. Enhou, C. Qun, and W. Yingzi, "Optimization of One-Way Traffic Organization for Urban Microcirculation Transportation Network," J. Transpn, Sys. Eng. and IT, vol. 9, no. 4, pp. 30-35, 2009.
[41] M. L. Simoesa and I. M. Ribeiroa, "Global optimization and complementarity for solving a semiactuated traffic control problem," Procedia - Social and Behavioral Sciences, vol. 20, no. , pp. 390-397, 2011.
[42] X. Li, G. Li, S.- S. Pang, X. Yang, and J. Tian, "Signal timing of intersections using integrated optimizationof traffic quality, emissions and fuel consumption: a note," Transportation Research Part D, vol. , no. 9, pp. 401-407, 2004.
[43] S. -W. Chiou, "Optimization of a nonlinear area traffic control system with elastic demand," Automatica, vol. 46, no. , pp. 1626-1635, 2010.
[44] H. Peifeng, T. Zongzhong, Y. Zhenzhou, and J. Shunping, "Variable-Bandwidth Progression Optimization in Traffic Operation," J. Transpn. Sys. Eng. and IT, vol. 11, no. 1, pp. 61-72, 2011.
[45] C. Xiaohong, Q. Dalin, and S. Donghua, "Multi-objective Optimization Method of Signal Timing for the Non-motorized Transport at Intersection," J. Transpn. Sys. Eng. and IT, vol. 11, no. 2, pp. 106-111, 2011.
[46] J. He and Z. Hou, "Ant colony algorithm for traffic signal timing optimization," Advances in Engineering Software, vol. 43, no. , pp. 14-18, 2011.
[47] Y. K. Wong and W. L. Woon, "An iterative approach to enhanced traffic signal optimization," Expert Systems with Applications, vol. 34, no. 4, pp. 2885-2890, 2008.
[48] M. Haibo, Y. Jianning, and L. Linzhong, "Evacuation Routes Optimization with Effects of Traffic Light at Intersections," J. Transpn, Sys. Eng. and IT, vol. 11, no. 3, pp. 76-82, 2011.
[49] S. Sellato, L. Fortuna, M. Frasca, J. G.-Gardenes, and V. Latora, "Traffic optimization in transport networks based on local routing," Europhys. Lett., vol. 73, no. , pp. 303-309, 2009.
[50] Y. Naito and T. Nagatani, "Safety-collision transition induced by lane changing in traffic flow," Physics Letters A, vol. 375, no. , pp. 1319-1322, 2011.
[51] C. F. Daganzo, V. V. Gayah, and E. J. Gonzales, "Macroscopic relations of urban traffic variables: Bifurcations, multivaluedness and instability," Transportation Research Part B, vol. 45, no. , pp. 278-288, 2011.
[52] V. V. Gayah and C. F. Daganzo, "Clockwise hysteresis loops in the macroscopic Fundamental Diagram: An effect of network instability," Transportation Research Part B, vol. 45, no. , pp. 643-655, 2011.
[53] C. F. Daganzo, "On the macroscopic stability if freeway traffic," Transportation Research Part B, vol. 45, no. , pp. 782-788, 2011.
[54] Y. Hori, T.H. Kim, and S. Hara, "Existence criteria of periodic oscillations in cyclic gene regulatory networks," Automatica, vol. 44, no. , pp. 1203-1209, 2011.
[55] H. El-Samad, D. Del Vecchio, and M. Khammash, "Repressilators and promotilators: loop dynamics in synthetic gene networks," Proc. ACC, vol. , no. , pp. 4405-4410, 2005.
[56] C. Zhu and G. Yin, "On hybrid competitive Lotka-Volterra ecosystems," Nonlinear Analysis, vol. , no. 71, pp. 1370-1379, 2009.
[57] A. J. Schwartz, "A generalization of a Poincar¶e-Bendixson theorem to closed twodimensionalmanifolds," Amer. J. Math., vol. , no. 85, pp. 453-458, 1963.