研究背景・先行研究
近年, インターネットの拡大や無線通信の高速化により, 制御系の設計において通信路を介した制御に関する研究が盛んになっている[1-3].その応用範囲も工場内の産業用ロボットの遠隔制御や手術ロボットを用いた遠隔手術など多様である.
通信路を介した制御について考える上で解決する問題として,通信容量の有限性への対応が挙げられる.制御オペレーション中の通信量を低減するための手法は数多く提案されている.
量子化信号を用いた制御
通信量を削減する手法のひとつに,量子化信号を用いることで一度に送信する情報を削減するといった方法がある[-/].文献[3]では入力信号が量子化される場合について解析しており,安定化を達成する上での最も粗い量子化器が制御対象の不安定極によって特徴づけられることを示している.文献[4,5]では通信路に確率的なパケットロスが発生する場合について,安定化を達成するための最も粗い量子化器を導出している.
また,文献[6,7]では制御対象が不確かさを有する場合について,適応制御器と動的量子化器を用いることで制御器とアクチュエータ間の通信量を低減しつつ安定化を達成する手法が示されている.文献[8]では制御対象が不確かさを有する場合について,閉ループ系の受動化とセンサと制御器間通信量の低減を達成する適応制御手法を提案されている.文献[9]においてはStrict Feedback Formの構造を持つ不確かさを持つシステムに対して量子化された入力を用いた場合について,backstepping法を用いた安定化適応制御手法が提案されている.量子化入力を用いた適応制御についてはほかに[10]がある.この文献では,システムの不確かさについて上界などの事前知識が必要ではあるが,適応が早いためパラメータの変動に対してロバストな制御系となっている.文献[11]ではロバスト制御の手法を用いることで安定化を図っている.
イベント駆動型制御
通信量を削減するもうひとつの手法として,イベント駆動型制御がある.イベント駆動制御とは,イベント駆動機構と呼ばれる通信の是非を判定する機構を用いて通信の回数を削減し,安定性や制御性能を損なうことなくシステムと制御器の間の通信量を減らそうという制御手法である.文献[12]ではセンサは状態の値を取得し,リアプノフ関数の時間微分を計算し時間微分の値が0になった瞬間に通信を行うという手法を提案している.文献[13]では, イベント駆動機構にリアプノフ関数の時間微分にローパスフィルタをかけたものを用いることでより少ない通信回数で安定化を図っている.文献[14]では,イベント駆動機構が全状態変数を利用できない場合におけるイベント駆動機構の設計法を提案している.また,イベント駆動型制御の特殊な例のひとつとして自己駆動型制御[15,16]がある.自己駆動型制御とは,状態を取得した時点で次に状態取得を行う時刻を決定する,内部クロックをトリガ機構に用いたイベント駆動型制御のひとつである.文献[17]では,制御器側がセンサから送信がない時間においてモデル情報による推定を用いることで,入力を構成する手法が提案されている.文献[18-20]では,イベント駆動時刻時刻の間隔に着目して解析を行っており,連続時間イベント駆動型制御システムが静的な出力フィードバック系においてZeno Behaviorが発生してしまうことが報告されている.これに対して文献[21,22]で提案された周期イベント駆動型制御では,イベント駆動機構の動作を周期的にのみ行うことによって,Zeno Behaviorの発生を防いでおり,実装が現実的になっている.また,しばしば周期イベント駆動型制御は離散時間モデルで表現される.文献[23]では,周期イベント駆動型制御を含むあるクラスのハイブリッドシステムのL2ゲインの解析をリフティングという手法を用いて行っている.ここで解析されたハイブリッドシステムのクラスは,入力の飽和制約や量子化など,あるクラスの非線形要素も含んでいる.文献[24]では,イベント駆動機構に一定時間待機動作を取り入れることでZeno Behaviorの発生を防ぎつつ,より良好な制御性能を得られることを示している.
大規模システムに対する分散制御にイベント駆動型制御を導入した研究も複数存在する.イベント駆動型制御において.文献[11,25]では, 複数のサブシステムと分散制御器からなるネットワークシステムに対し, 大規模非線形スモールゲイン定理[26]を用いることによって安定性を保証するトリガ条件を導出している. さらに[27]では, このトリガ条件を用いた場合ゼノン解が生じることを指摘し, ゼノン解が生じないトリガ条件へと改良を行っている.文献[28]では特異摂動系で記述された大規模なシステムに対して, 遅いダイナミクスのみを取り出した近似モデルに基づいたトリガ条件を提案している.またマルチエージェント系におけるイベント駆動型制御系について考察したものに[29-33]がある.文献[29]では,single integrator型のマルチエージェント系におけるトリガ条件を定め,合意問題が達成されることを示している.文献[30]では,[29]の成果をエージェントが一般の線形ダイナミクスを持つ場合に拡張している.文献[31]では,エージェントが一般の線形ダイナミクスを持つ場合についてリーダー追従問題を取り扱っている.文献\[32]では, マルチエージェント系におけるセンサが周期的に動作し各ステップで制御器への送信するかを決定するサンプル値イベント駆動型制御が考察されている.文献[33]では,自分自身の状態変数のみに基づいたトリガ条件を提案し,平均合意を達成することを示している.適応制御にイベント駆動制御を導入した研究としては[34,35]がある.文献[34]では,Strict Feedback Formの構造を持つ不確かさを持つ連続時間非線形システムにおいて,制御器・アクチュエータ間の通信を低減しかつ安定化させるための制御器およびイベント駆動機構が提案されている.
研究目的
センサ・アクチュエータ間にイベント駆動機構を導入した適応制御についてはまだ先行研究が少ない.問題の難しさとして,適応制御においては安定性解析において常にコントロールゲインを適応的に変化させていくことが求められるに対して,センサ・アクチュエータ間にイベント駆動機構を用いた場合イベント駆動がない時刻においては,状態の情報を取得することができずゲインの更新が不可能であることが挙げられる.本研究の目的は不確かさを持つ離散時間線形システムに対して,制御オペレーション中の通信のビットレートの低減し,かつ安定化を保証するようなイベント駆動型適応制御の枠組みを構築することである.(図1)
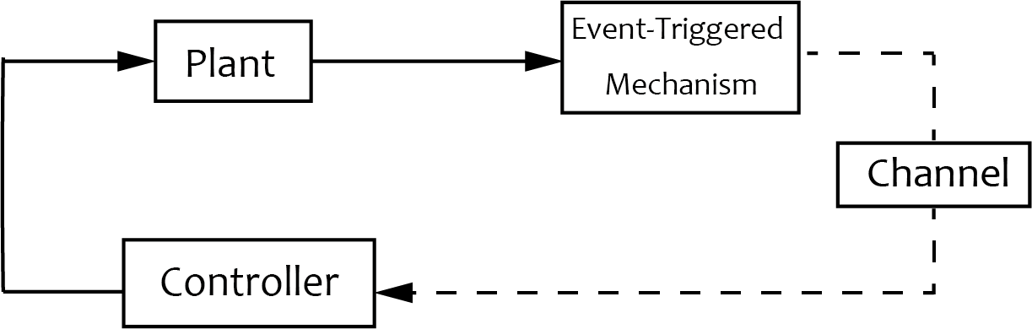 |
| 図1: センサ・アクチュエータ間のイベント駆動型制御系 |
提案手法
今回は不確かさを持つ1次元の離散時間線形システムを対象としている.提案手法においては,図2に示すように,収束の指標をひとつ定めシステムの振る舞いが理想的である場合は通信を行わず,制御器側はモデルの情報をもとに状態の値を推定し入力を構成する.なおこのときフィードバックゲインの更新を行わないシステムの振る舞いが理想的でなくなったときにのみ,通信を行うよう駆動条件を設計している.数値シミュレーションの結果を図3に示す.縦の破線で通信時刻を示している.状態が原点に収束し,かつ通信の回数が低減されていることがわかる.
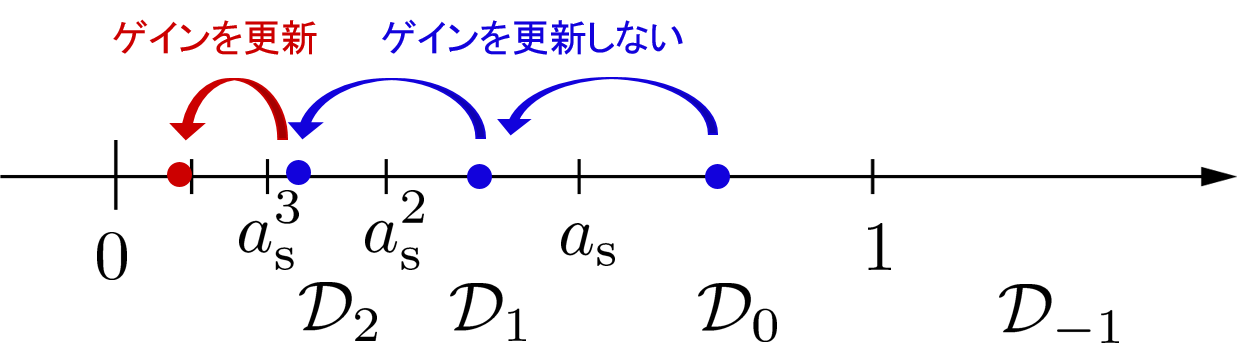 |
| 図2: 提案手法 |
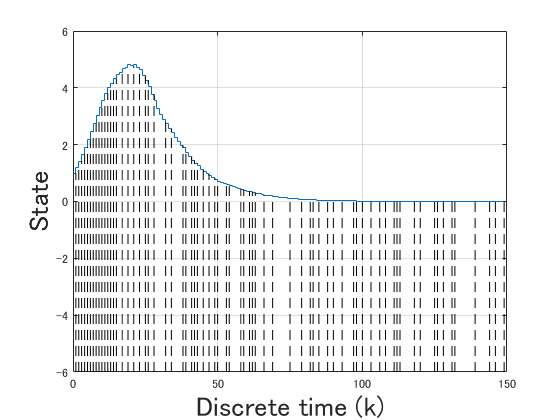 |
| 図3: 数値シミュレーション |
今後の課題
現状,提案手法は1次元の離散時間線形システムにのみを想定しているが,現実のシステムは多次元かつ非線形なものが大半である.これからの課題として,多次元システムへの拡張などが挙げられる.
参考文献
[1] L. Zhang, H. Gao, and O. Kaynak, "Network-induced constraints in networked control systems a survey," IEEE Transactions on Industrial Informatics, vol. 9, pp. 403-416, 2013.
[2] 津村 幸治, 石井 秀明, "量子化信号を含む制御系の設計・システム同定," 計測と制御, vol. 44, pp. 70-77, 2005.
[3] G. N. Nair and F. Fagnani and S. Zampieri and R. J. Evans, "Feedback Control Under Data Rate Constraints: An Overview," Proceedings of the IEEE, vol. 95, pp. 108-137, 2007.
[4] K. Tsumura, and H. Ishii, and H. Hoshina, "Tradeoffs between quantization and packet loss in networked control of linear systems," Automatica, vol. 45, pp. 2963-2970, 2009.
[5] K. Okano and H. Ishii, "Stabilization of Uncertain Systems With Finite Data Rates and Markovian Packet Losses," IEEE Transactions on Control of Network Systems, vol. 1, pp. 298-307, 2014.
[6] T. Hayakawa, H. Ishii, and K. Tsumura, "Adaptive quantized control for linear uncertain discrete-time systems," Automatica, vol. 45, pp. 692-700, 2009.
[7] T. Hayakawa, H. Ishii, and K. Tsumura, "Adaptive quantized control for nonlinear uncertain systems," Systems & Control Letters, vol. 58, pp. 625-632, 2009.
[8] A. Selivanov, A. Fradkov, and D. Liberzon, "Adaptive control of passifiable linear systems with quantized measurements and bounded disturbances," Systems & Control Letters, vol. 88, pp. 62-67, 2016.
[9] J. Zhou, C. Wen, and G. Yang, "Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal," IEEE Transactions on Automatic Control, vol. 59, pp. 460-464, 2014.
[10] H. Sun, N. Hovakimyan, and T. Basar, "L1 adaptive controller for uncertain nonlinear multi-input multi-output systems with input quantization," IEEE Transactions on Automatic Control, vol. 57, pp. 565-578, 2012.
[11] T. Liu and Z. P. Jiang, "A Small-Gain Approach to Robust Event-Triggered Control of Nonlinear Systems," IEEE Transactions on Automatic Control, vol. 60, pp. 2072-2085, 2015.
[12] P. Tabuada, "Event-triggered real-time scheduling of stabilizing control tasks," IEEE Transactions on Automatic Control, vol. 52, pp. 1680-1685, 2007.
[13] A. Girard, "Dynamic triggering mechanisms for event-triggered Control," IEEE Transactions on Automatic Control, vol. 60, pp. 1992-1997, 2015.
[14] R. Postoyan and A. Girard, "Triggering mechanism using freely selected sensors for linear time-invariant systems," IEEE Conference on Decision and Control, pp. 4812-4817, 2015.
[15] C. De Persis and P. Frasca, "Robust self-triggered coordination with ternary controllers," IEEE Transactions on Automatic Control, vol. 58, pp. 3024-3038, 2013.
[16] C. De Persis, P. Frasca, and J. M. Hendrickx, "Self-triggered rendezvous of gossiping second-order agents," IEEE Conference on Decision and Control, pp. 7403-7408, 2013.
[17] J. Lunze and D. Lehmann, "A state-feedback approach to event-based control," Automatica, vol. 46, pp. 211-215, 2010.
[18] D. P. Borgers and W. P. M. H. Heemels, "On minimum inter-event times in event-triggered control," IEEE Conference on Decision and Control, pp. 7370-7375, 2013.
[19] M. C. F. Donkers and W. P. M. H. Heemels, "Output-based event-triggered control with guaranteed L∞-gain and improved and decentralized event-triggering," IEEE Transactions on Automatic Control, vol. 57, pp. 1362-1376, 2012.
[20] D. P. Borgers and W. P. M. H. Heemels, "Event-separation properties of event-triggered control systems," IEEE Transactions on Automatic Control, vol. 59, pp. 2644-2656, 2014.
[21] W. P. M. H. Heemels, M. C. F. Donkers, and A. R. Teel, "Periodic event-triggered control for linear systems," IEEE Transactions on Automatic Control, vol. 58, pp. 847-861, 2013.
[22] W. P. M. H. Heemels and M. C. F. Donkers, "Model-based periodic event-triggered control for linear systems," Automatica, vol. 49, pp. 698-711, 2013.
[23] W. P. M. H. Heemels, and G. E. Dullerud, and A. R. Teel, "L2-Gain Analysis for a Class of Hybrid Systems With Applications to Reset and Event-Triggered Control: A Lifting Approach," IEEE Transactions on Automatic Control, vol. 61, pp. 2766-2781, 2016.
[24] A. Selivanov and E. Fridman, "Event-Triggered H-infinity Control: A Switching Approach," IEEE Transactions on Automatic Control, vol. 61, pp. 3221-3226, 2016.
[25] C. De Persis, R. Rudolf, and F. Wirth, "On a small-gain approach to distributed event-triggered control," IFAC Proceedings, vol. 44, pp. 2401-2406, 2011.
[26] S. N. Dashkovskiy, B. S. Ruffer, and F. R. Wirth, "Small Gain Theorems for Large Scale Systems and Construction of ISS Lyapunov Functions," SIAM Journal on Control and Optimization, vol. 48, pp. 4089-4118, 2010.
[27] C. De Persis, R. Sailer, and F. Wirth, "Parsimonious event-triggered distributed control: A Zeno free approach," Automatica, vol. 49, pp. 2116-2124, 2013.
[28] M. Abdelrahim, R. Postoyan, and J. Daafouz, "Event-triggered control of nonlinear singularly perturbed systems based only on the slow dynamics," Automatica, vol. 52, pp. 15-22, 2015.
[29] D. V. Dimarogonas, E. Frazzoli, and K. H. Johansson, "Distributed event-triggered control for multi-agent systems," IEEE Transactions on Automatic Control, vol. 57, pp. 1291-1297, 2012.
[30] L. Garcia, Y. Cao, and D. W. Casbeer, "Decentralized event-triggered consensus with general linear dynamics," Automatica, vol. 50, pp. 2633-2640, 2014.
[31] Y. Cheng and V. Ugrinovskii, "Event-triggered leader-following tracking control for multivariable multi-agent systems," Automatica, vol. 70, pp. 204-210, 2016.
[32] G. Guo, L. Ding, and Q. Han, "A distributed event-triggered transmission strategy for sampled-data consensus of multi-agent systems," Automatica, vol. 50, pp. 1489-1496, 2014.
[33] G. S. Seyboth, and D. V. Dimarogonas, and Karl H. Johansson, "Event-based broadcasting for multi-agent average consensus," Automatica, vol. 49, pp. 245-252, 2013.
[34] L. Xing, C. Wen, Z. Liu, H. Su, and J. Cai, "Event-triggered adaptive control for a class of uncertain nonlinear systems," IEEE Transactions on Automatic Control, vol. 62, pp. 2071-2076, 2017.
[35] D. Ogawa and T. Hayakawa, "Adaptive control for linear uncertain discrete-time systems with event-triggered mechanisms," IFAC-PapersOnLine, vol. 50, pp. 10108-10113, 2018.