研究背景と先行研究
機械学習
近年急速に研究が進められている計算機科学の分野の1つとして, 機械学習が挙げられる.機械学習とは,与えられた訓練データ集合を解析することによって,そのデータを生成した潜在的機構の特徴を捉えることを主目的とした解析技術の総称である.機械学習は教師あり学習と教師なし学習に大別される.教師あり学習とは手書き文字認識や遺伝子診断などのパターン認識にみられるように,あるシステムに与えられた入力と,それに対応する出力の組の訓練データ集合から,そのシステムの入出力関係(入力から出力への写像)を推定し,訓練データ集合の中に存在しない未知の入力に対する出力を推定する学習である.一方,教師なし学習とはクラスタリングやデータの生成確率密度関数の推定などでみられるような,システムの入力のみの訓練データからシステムの特徴を推定する学習である[1].近年では,元来研究がなされてきたPAC学習(Probably Approximately Correct learning)やVC次元(Vapnik Chervonenkis dimension)などの概念に代表される学習可能性に関する理論である計算論的学習理論に,統計学やデータマイニング,最適化理論などの様々な分野が融合することで,急速に発展を続けている.
機械学習と動的システム
機械学習の研究対象は元来静的なシステムであり,独立同時分布(independent and identicallydistributed)に従うデータを用いてパターン認識,回帰分析をおこなう研究が盛んに行われてきた.しかし近年ではその解析対象として動的システムが取り上げられることが多くなってきている.具体的な対象としては,各需要家における電力消費量[2],[3]や,人間の動作[4]などが挙げられ,過去に得られた電力消費量のデータや動画データを用いて,未来の電力消費量や人間の動作の予測をすることを目的としている.上記の例に見られるように,機械学習の研究対象としては,その挙動を表すモデル(微分方程式や差分方程式)が未知であり,かつ外部からの雑音が印加されているような動的システムが取り上げられるようになっており,その動的システムの出力値の予測を主な目的とした研究が多く行われている.ここで例として,各需要家における消費電力の予測をすることの重要性を述べる.1日の消費電力量のピークを始めとする電力消費量の時系列を推定することにより,発電所における無駄な発電もしくは供給電力量不足を防ぐことができると考えられる.また,各需要家に供給される電力の値段は,需要電力が多いときには高くなり,需要電力が少ない時には安くなる.よって予め各需要家が電力消費量の予測をし,電力消費量がピークとなる時間帯を推定することにより,電力の値段がピークとなる時間帯を避けた電力利用のスケジューリングなどが可能となると考えられる.
また,制御工学においても,従来研究が行われてきた機械学習分野の知識をシステム同定の分野に応用することが行われるようになってきている[5],[6].その1つとして,隠れマルコフモデルや動的ベイジアンネットワークなどにおける潜在変数を,対象とする動的システムの状態変数とおくことで,動的システムのモデルの学習を行う研究[7]が挙げられる.また,文献[8],[9]などにみられるように,非線形動的システムの入出力関係を表す関数をカーネル関数の線形和で表現することにより,動的システムの入出力関係を学習する研究が挙げられる.カーネル関数の線形和による非線型関数近似には,カーネルトリックによりVolterra級数を有限次数で打ち切ることなくシステムの入出力関係を記述可能であるという,従来の動的システムの入出力関係の同定手法にはない利点が存在する.カーネル関数を用いた非線型関数近似法の一つにsupport vector machine(SVM)があり,SVMを利用して動的システムの入出力関係の同定を行う研究が多くなされている.SVMの利点の一つとして一般のカーネル法による学習アルゴリズムに比べ疎な解が得られ,かつ解くべき最適化問題によって得られる解が大域解となることが挙げられる.文献[8]では,多入力多出力(MIMO)のHammerstein modelに対して,SVMから派生した非線形関数近似手法の一つであるleast squares support vector machine(LS-SVM)によりシステム同定を行っている.Hammerstein modelは静的な非線形関数と線形動的システムが直列に連結した非線形システムを表すモデルのひとつであり,文献[8]では非線形関数と線形システムの伝達関数のパラメータをLS-SVMにより求めている.入力空間から高次の特徴空間(無限次元の可能性もある)への写像の内積をカーネル関数として表現し,ラグランジアンを構成することによってパラメータ推定が線形方程式を解くことに帰着されることを利用し,各カーネル関数の重みパラメータと線形システムの伝達関数のパラメータを一度に求められるような線形方程式を導出している.文献[10],[11]ではlinear programming support vector regression(LP-SVR)という手法を用いて非線形な動的システムの入出力関係を同定している.従来のSVRでは2乗誤差項(epsilon許容誤差関数)にL2正則化項を加えた目的関数を最小化するという最適化問題を解くことで回帰関数を求めるが,LP-SVRではL2正則化項をL1正則化項に置き換えた目的関数を最小化することで回帰関数を求めている.この置き換えによりさらにスパースな解が得られることが分かっており,最適化問題の制約条件を緩めることで線形計画法により解が得られることを利用している.
動的システムの分散的学習アプローチ
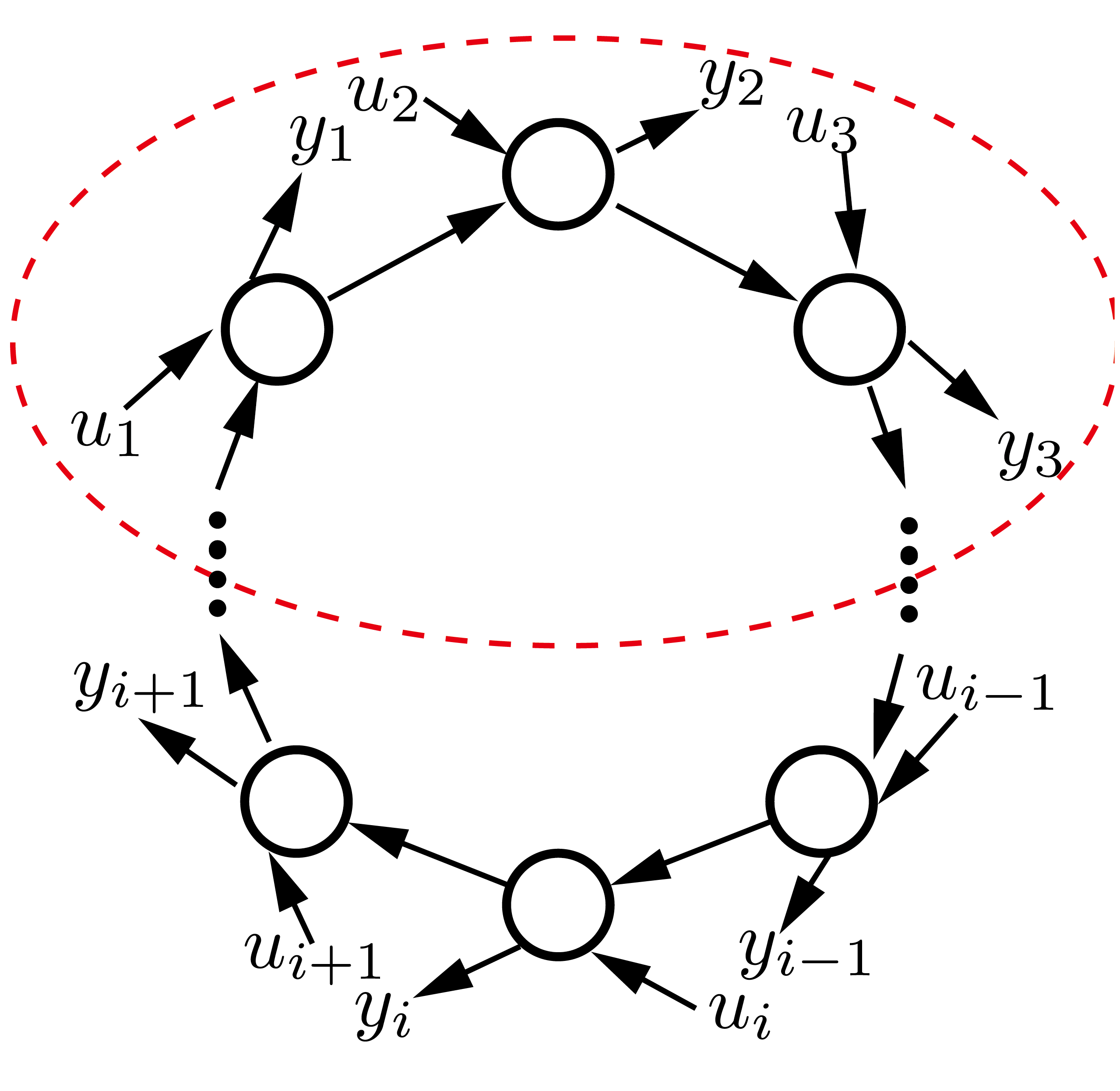
また,近年電力ネットワークの制御[12]や複数のビークルのフォーメーション制御[13]など,次元の大きさなどのシステムの特性により集中的な制御手法が適用できないシステムに対して,分散的手法により制御を行うことを目的とした研究が多くなされている.動的システムを分散的に制御する手法は多く提案されているが,先行研究において提案されている動的システムの学習を行う手法は集中的なアプローチであり,分散的に動的システムを学習することはなされていない.本研究での分散的な学習アプローチとは,図2に示されるように,"いくつかのサブシステムが連結したネットワークシステムを考えたとき,すべてのサブシステムの入出力の情報を使わず,一部のサブシステムの入出力の情報のみを用いて学習を行うこと"を表す.そこで本研究では前述した集中的なアプローチに向かない動的システムを想定し,そのシステムを分散的に学習する手法について提案する.
 |
| 図1: Centralized approach |
 |
| 図2: Distributed approach |
本研究の問題設定とアプローチ
対象とするシステム
本研究では図3で表される,3つの同一なサブシステムが有向のエッジで円環状に連結されているシステムを考える.各サブシステムは状態の次元数がnである1入力1出力の線形システムであり,それぞれのサブシステムは等しく,それぞれのサブシステムをつないでいるエッジにかかっている重み行列も等しい.また,各サブシステムの状態の初期値は0であり,各サブシステムの出力には平均0のガウスノイズが加えられているとする.
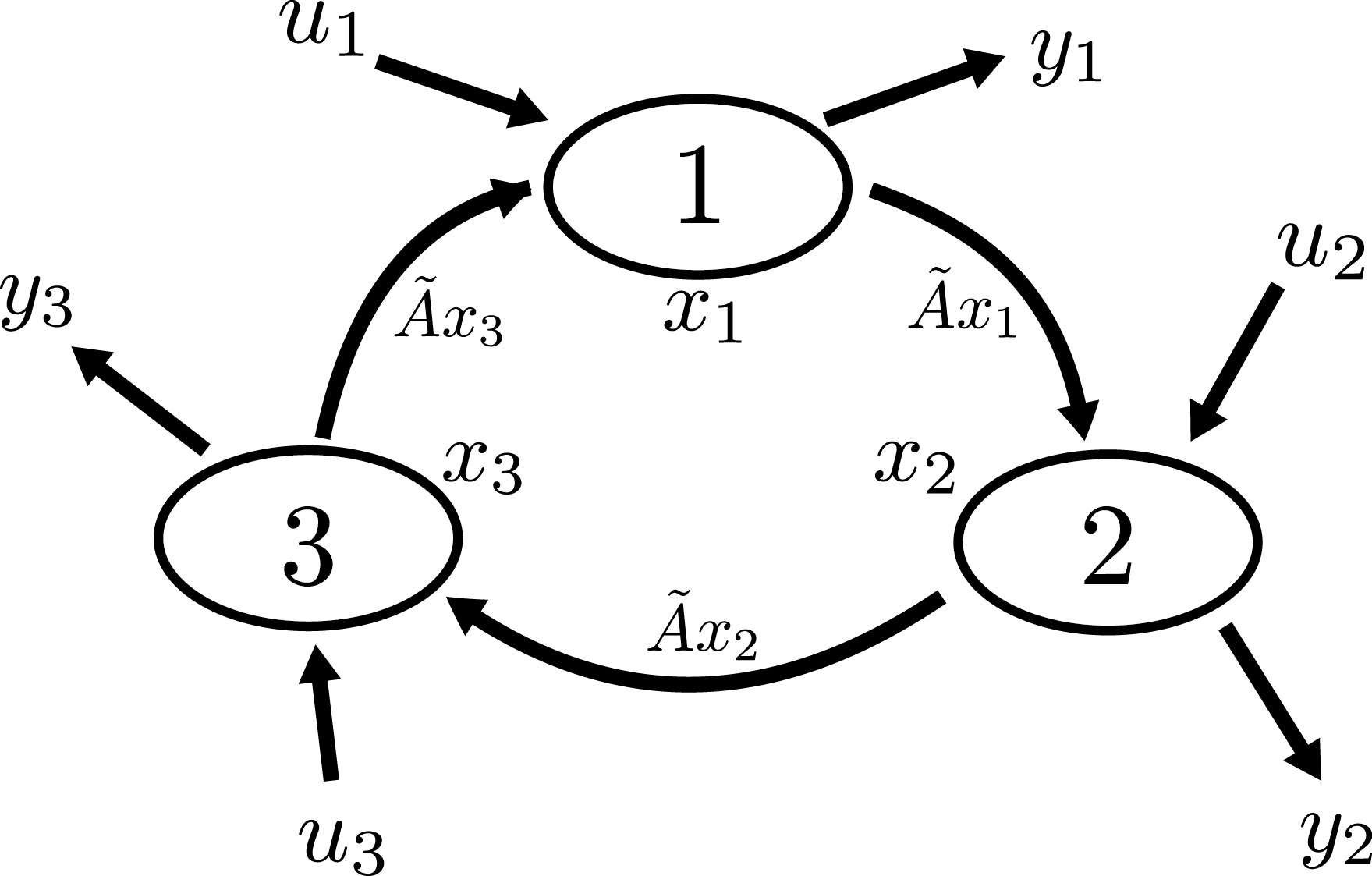 |
| 図3: Interconnected system with a circular connection |
学習アプローチ
ここで従来行われてきた集中的な学習のアプローチと,本研究で提案する分散的な学習のアプローチの違いについて説明する.
いま,サブシステムの一つに注目し,そのサブシステムの出力値を予測することを考える.このとき,集中的な学習アプローチでは,図4に見られるようにすべてのサブシステムの入力の情報と着目したサブシステムの出力の情報を用いて,着目したサブシステムの出力値の予測を行う.これに対し本研究で提案する分散的な学習アプローチは,図5に見られるように,着目したサブシステムの入出力の情報と,着目したサブシステムの上流のサブシステムの入出力の情報を用いて,着目したサブシステムの出力値の予測を行う.このように分散的なアプローチはすべてのサブシステムに関する情報を使わず,一部のサブシステムに関する情報のみを用いて着目したサブシステムの出力値を予測でき,これはあるサブシステムの入出力の情報を得ることができないようなシステムを対称とした場合でも,着目したサブシステムの出力値を予測することができるといった利点がある.
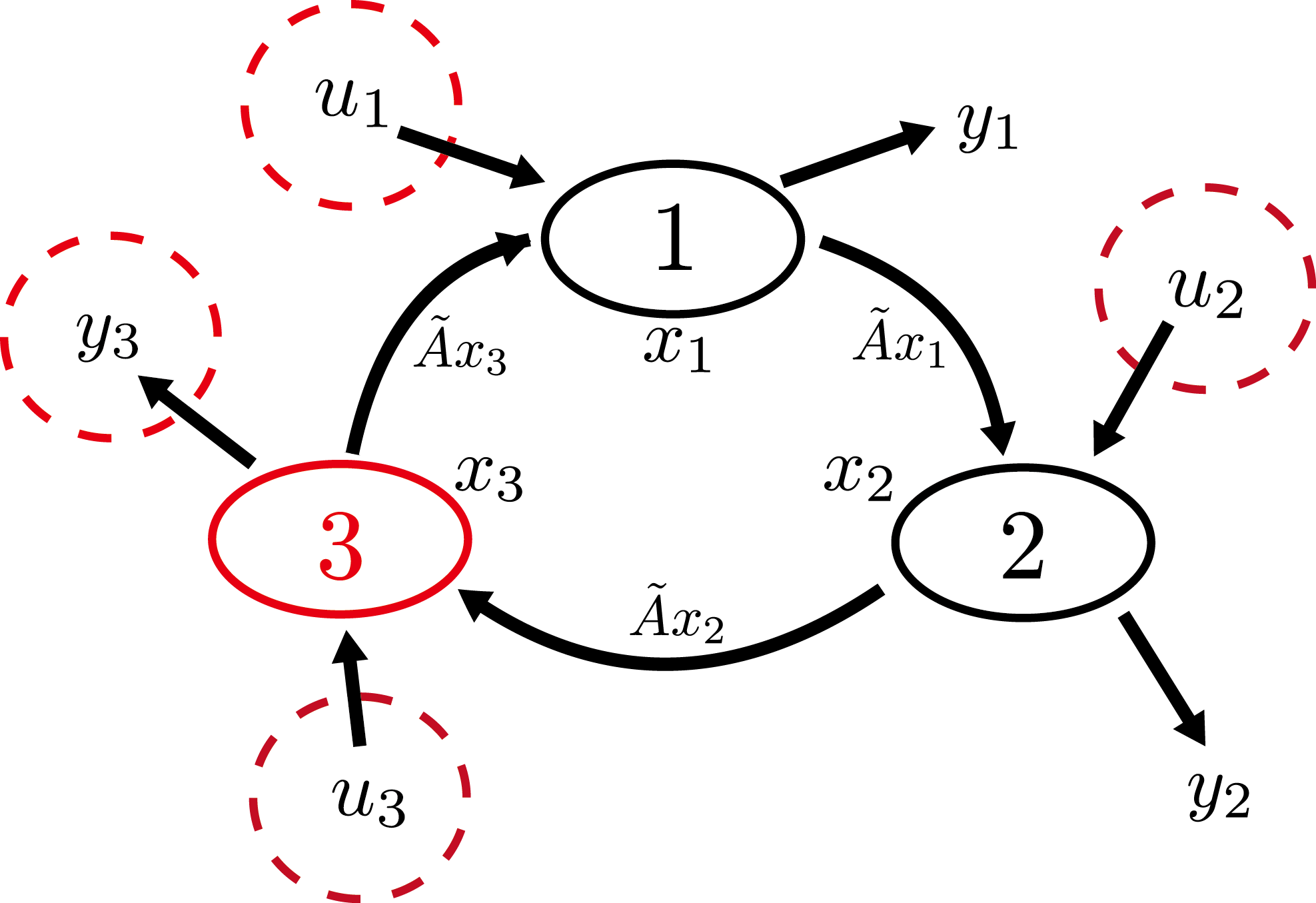 |
| 図4: Centralized approach |
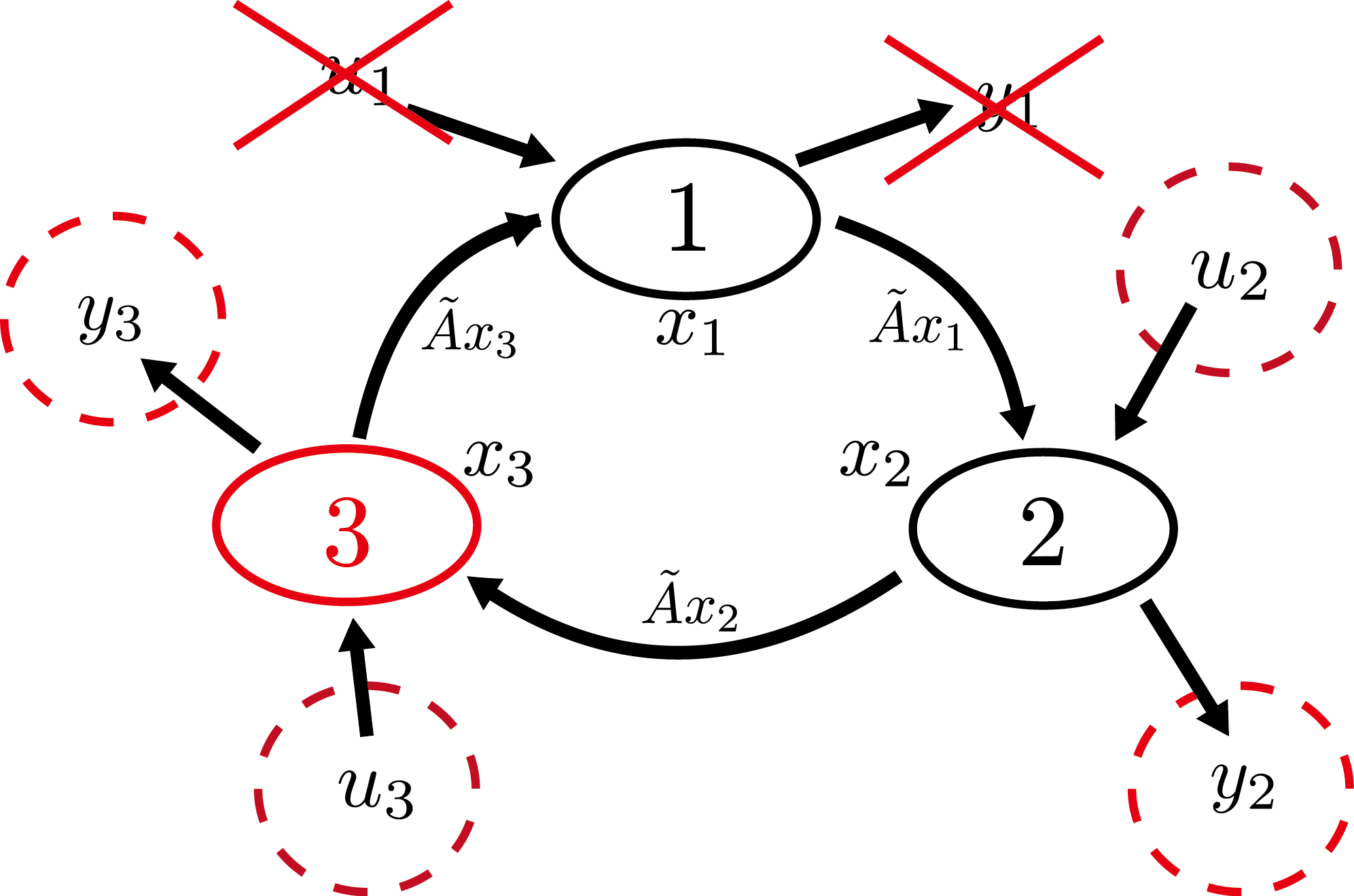 |
| 図5: Distributed approach |
学習のアプローチの手順としては,まず各サブシステムの状態方程式から,システムの入出力関係式を導出する.次に得られたシステムの入出力関係式から,注目したサブシステムの入出力と注目したサブシステムの上流に位置するサブシステムの入出力の間の関係式を導出する.最後にその関係式に現れる未知パラメータを,着目するサブシステム,その上流に位置するサブシステムの過去の入出力値のデータを用いて,最尤法を基礎としたアルゴリズムにより推定する.この様な手順で推定したパラメータを用いて,着目したサブシステムの出力値の予測を行うことに成功した.
数値シミュレーション
提案したアルゴリズムを用いて数値シミュレーションを行った結果を次に示す.図6には着目したサブシステムの出力値の推定値と真値を,図7にはRMSE(平均二乗誤差)を示した.
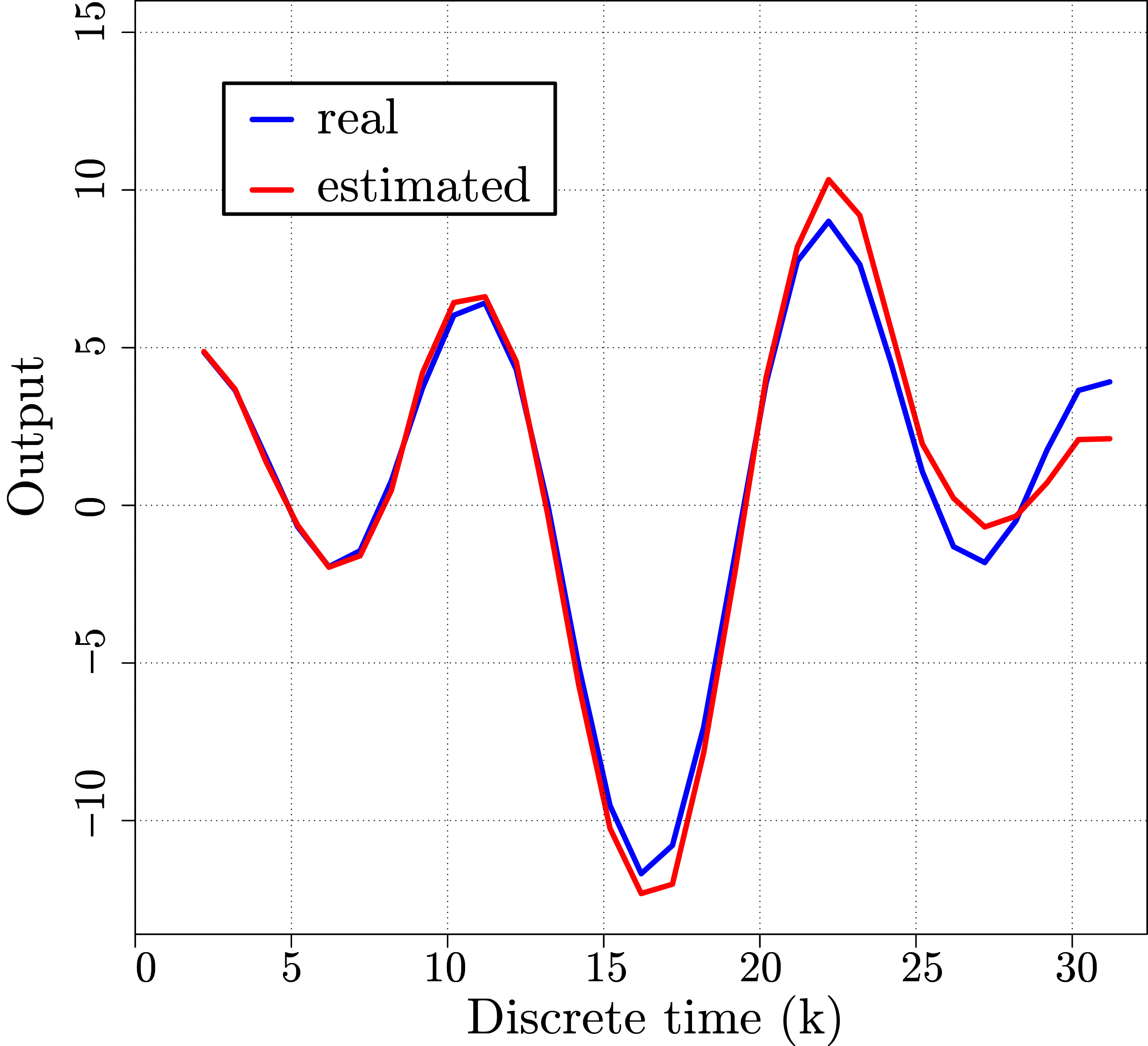 |
| 図6: Comparison of the real output signal with the estimated output signal |
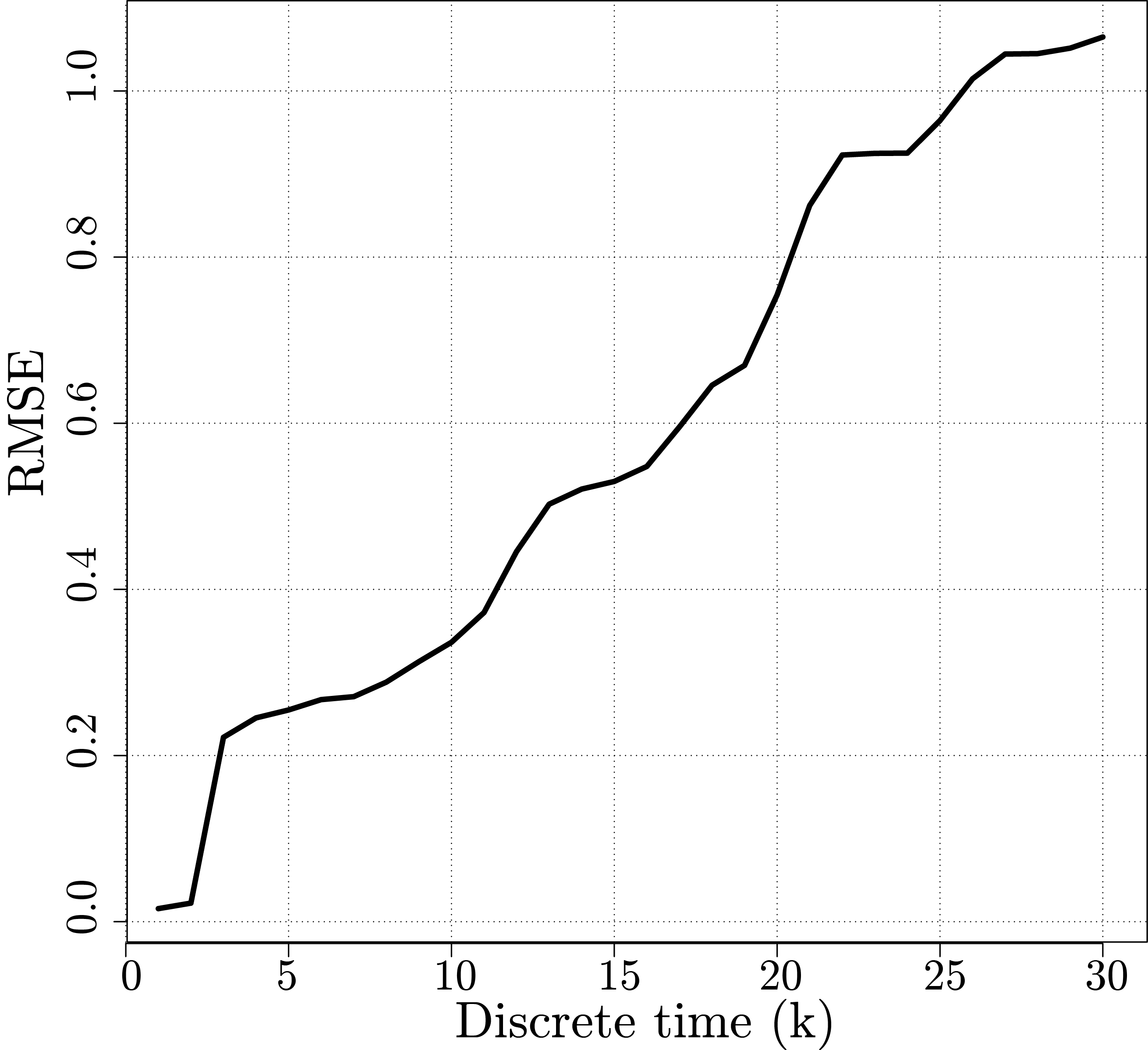 |
| 図7: RMSE of the output signal |
今後の方針
本研究で対象としたシステムは,同一な3つのサブシステムが円環状に有効グラフで連結したシステムであり,極めて単純なモデルとなっている.そこで今後の方針として,サブシステムの数を増やし,様々なネットワーク構造を持ったシステムを対象とすることを挙げる.このとき全体のシステムを構成するそれぞれのサブシステムのシステムパラメータが異なる場合について考察すること,どのようなネットワーク構造をもったシステムならば本研究で提案した分散的な学習アプローチが適応できるのかについて考察すること,を具体的な目標としたい.
参考文献
[1] Christopher M. Bishop, Pattern Recognition and Machine Learning, Springer, 2007.
[2] Bing Dong, Cheng Cao and Siew Eang Lee, "Applying support vector machines to predict building energy consumption in tropical region," Energy and Buildings, vol. 37, no. 5, pp. 545-553, 2005.
[3] Kadir Kavaklioglu, "Modeling and prediction of Turkey's electricity consumption using Support Vector Regression," Applied Energy, vol. 88, no. 1, pp. 368-375, 2011.
[4] Antonios Oikonomopoulos, Maja Pantic and Ioannis Patras, "Sparse B-spline polynomial descriptors for human activity recognition," Image and Vision Computing, vol. 27, no. 12, pp. 1814-1825, 2009.
[5] Lennart Ljung, "Perspectives on system identification," Annual Reviews in Control, vol. 34, no. 1, pp. 1-12, 2010.
[6] Brett Ninness and Soren Henriksen, "Bayesian system identification via Markov chain Monte Carlo techniques," Automatica, vol. 46, no. 1, pp. 40-51, 2010.
[7] Tapani Raiko and Matti Tornio, "Variational Bayesian learning of nonlinear hidden state-space models for model predictive control," Neurocomputing, vol. 72, no. 16--18, pp. 3704-3712, 2009.
[8] Ivan Goethals, Kristiaan Pelckmans, Johan A.K. Suykens and Bart De Moor, "Identification of MIMO Hammerstein models using least squares support vector machines," Automatica, vol. 41, no. 7, pp. 1263-1272, 2005.
[9] Chia Nan Ko, "Integration of support vector regression and annealing dynamical learning algorithm for MIMO system identification," Expert Systems with Applications, vol. 38, no. 12, pp. 15224-15233, 2011.
[10] Zhao Lu, Jing Sun and Kenneth R. Butts, "Linear programming support vector regression with wavelet kernel: A new approach to nonlinear dynamical systems identification," Mathematics and Computers in Simulation, vol. 79, no. 7, pp. 2051-2063, 2009.
[11] Zhao Lu and Jing Sun, "Non-Mercer hybrid kernel for linear programming support vector regression in nonlinear systems identification," Applied Soft Computing, vol. 9, no. 1, pp. 94-99, 2009.
[12] Enrico De Tuglie and Silvio Marc, "Feedback-linearization and feedback-feedforward decentralized control for multimachine power system," Electric Power Systems Research, vol. 78, no. 3, pp. 382-391, 2008.
[13] G. Lafferriere, A. Williams, J. Caughman and J.J.P. Veerman, "Decentralized control of vehicle formations," Systems & Control Letters, vol. 54, no. 9, pp. 899-910, 2005.