風力発電
環境問題への配慮から再生可能エネルギーへの関心が高まっており, 火力や原子力に代わるクリーンで安全な発電方式として風力発電システムの導入が進んでいる. 風のエネルギーは風速の3乗に比例して大きくなる. 風力発電では理論上風のエネルギーの最大約59%まで電気エネルギーに変換することが可能である. 電気エネルギーに変換される風のエネルギーの割合は, 周速比と呼ばれる風速と風車の回転速度の比で決まるパワー係数によって与えられる.このパワー係数は解析的に求めることは困難であり, 一般に近似して用いられ, これまでに様々な近似方法が提案されている[4][12]. このパワー系数を最大化すること, つまり風力から電力への変換効率を最大化することは風力発電の主要な研究目標である. パワー系数の値を最大にする周速比は近似式から導くことができる. そのため, 現在の風速がセンサなどによって観測できるとすれば, 風車ロータの回転速度を制御することで常に周速比をパワー系数が最大となる値に保つことが可能である.これまでに, スライディングモード制御を用いて発電機内部を流れる電流を制御し, 風車ロータの回転速度を制御して出力を最大化する研究[13]などが行われている.また風速が観測できない場合でも, 極値制御手法を用いて出力を最大化したり[1], 永久磁石同期発電機を用いることで風速の情報なしに出力を最大化する研究[14]なども行われている. また, 風向きは頻繁に変化するため, 風力発電では風車ロータを風向と正対させなるべく効率良く風のエネルギーを取り出す工夫が必要である. その方法としてヨー制御があり, フリーヨーとパワーヨーの2種類がある. フリーヨーは風の力により受動的に風車ロータが風向に正対し, パワーヨーはタワー上部に組み込まれたアクチュエータによって適切な方向に風車ロータを向ける方法である. フリーヨーは風車が巨大になるほど耐久性に悪影響が出るため大型風力発電では主にパワーヨーが用いられている[27]. ヨー制御ではローターの回転によりジャイロモーメントが発生するほか, 同一方向に回転が続く事でケーブルがねじれるなど考慮しなくては行けない問題などが存在する[29].最近では①陸上よりも強く安定した風が吹く, 周辺地域への騒音公害, 景観問題などの心配がないなどの理由から風車を海洋上に建設した, 洋上風力発電への注目が集まっている.
洋上風力発電
洋上風力発電には海底から海面まで基礎構造物を建設し, その基礎構造物上に風車を建設する着床式風力発電と, 海面に浮いており, 海底に係留されている基礎構造物上に風車を建設する浮体式風力発電という2つのタイプがある. 着床式風力発電は水深の浅い海域(~80m)で用いられるが, それ以上水深が深くなると海底への基礎の建設が困難となる. しかし, 浮体式風力発電では水深の深い海域(80m~)でも風車を建設することが可能であり, 着床式風力発電が建設困難な海域でも発電を行うことができる. また, 一般的に水深が深くなる外洋ほど陸地に近い海域よりも強く安定した風を得ることができろ. このような理由から, より陸地から離れた洋上に風力タービンを建設することが可能な浮体式洋上風力発電は注目を受け, <-- -->様々な分野で研究が行われている. 浮体式洋上洋上風力発電は構造の違いからさまざまな種類が存在し, そのうち主要な4つのタイプとして, Spar-buoy type, Tension-leg platform (TLP) type, Semi-submersible type (Column stabilised), Pontoon-type (Barge-type) があげられる[19]. Spar-buoy typeは電柱のような細長い浮体を釣りの浮きのように海面に浮かべ, その上に風車を設置するタイプである. 2009年に, ノルウェーで"Hywind"と呼ばれる浮体式としては世界初の大規模洋上風力発電施設が沖合10km, 水深220mの海域で運用を開始した[5]が, この"Hywind"は Spar-buoy typeである. TLP typeは余剰浮力を浮体に持たせ, テンドンと呼ばれる鋼管で強制的に設計喫水まで浮体を沈めこむ係留方法を用いており, 他のタイプと比べて係留コストは高いが安定性がある. Semi-submersible typeは半潜水式浮体構造物上に風車を設置したタイプで洋上での石油の採掘にも風車の代わりに採掘用の機械を乗せて利用されている. Pontoon-typeははしけの上に風車を設置し, 他と比べ安価で製造も容易である反面, 安定性は他と比べ劣るという特徴がある. 浮体式風力発電は構造物全体が海面に浮いているため波風によって動揺する. この動揺によってブレードやシャフト, タワーなど風力発電システムを構成する各要素には疲労負荷がかかるため, 耐久性が低下し, 稼働年数が陸上での運用と比べ短くなることが問題である. そして, 揺れをいかにして抑えるか[6], そして揺れながら風車が回転するときの影響の解析などの課題が存在する. ローター面にかかる風負荷は風力発電が動揺するもっとも大きな要因の一つである. ローター面上に働く風負荷は, blade element momentum (BEM) theoryを用いて揚力係数や粘性係数などのローター特性から求められる. これらのロータ特性は解析的に求めることが難しく, 近似した式が用いられている[28].

先行研究
これまでに, "Gain Scheduling Proportional Integrator (GSPI) controller"を用いて,波風に起因する風力発電システムの動揺を低減できることが確認された[15]. この他に, 風力発電システムの研究として, ロータブレードのピッチ角度を帰ることでロータが風から得るエネルギー, 負荷, トルクなどを制御するブレードピッチ角制御を用いたものがある. ブレードピッチ角制御では出力の最適化と風から受ける負荷の低減という2つの制御目標があり, 出力の最適化では変動する風速に対して最適なトルク得るためにブレードピッチ角を制御する研究が行われ[34], 風からの負荷やそれによる風車の振動を低減する研究なども行われている[35][36]. 従来は各ブレードピッチ角をまとめて制御していたが, 最近では各ブレードを異なる角度に設定する手法も用いられてきている[32]. 基本的に風は同じ地点であっても上空の高さによって吹く風の強さは異なる. そのため, 巨大な風車であればあるほど風車ブレードは回転中の位置によって異なる風負荷を受ける事になる. そのようなとき, ブレードピッチ角を個別に制御することでそれぞれのブレードが最適な風負荷を得られるようになる. ロータ全体が風から受ける負荷は風速の2乗に比例し, 周速比とブレード角度から与えられる推力係数を用いて計算することが可能である. この推力係数はパワー係数などと同様に解析的に求めることは難しく, 近似式によって与えることができる[33]. また翼型特性やブレードの設定角などのデータがあればWilson, Lissamanなどの手法によって計算可能である. この他のブレード角度の個別制御に関する研究では"Experts PID controller"を用いて, 発電出力にほとんど影響を与えることなくピッチ方向の動揺を低減できることが確認された[26]. 一方で, ヨー方向の動揺は低減ができず課題として残っている. また, "Hywind"は"ballast-stabilized wind turbine"と呼ばれる方式の浮体式洋上風力発電システムであるが, 同じ方式の風力発電システムを対象として発電時に出力を最大化しつつ, ブレードなどの各要素にかかる疲労負荷を最小化する研究が行われている[16]. この研究では"Linear Quadratic Regulator (LQR) controller"を用いて出力最大化と疲労負荷の最小化に加え出力のオーバーシュートも抑えている. 風や波の影響による浮体式洋上風力発電システムの運動応答を調べる場合, 風速が一定という仮定を置いた研究が多い. 風速を変動させたシミュレーションでは運動応答への影響が確認され, 特にサージ方向の運動応答は風速が一定の時と比べ大きく変動している[21]. このシミュレーションでは波は規則波で考えられているため, 不規則な波を考えたときに規則波と比べどのような影響が出るかを見る必要がある. そして, 浮体式洋上風力発電の運動応答の解析では変動する風速と不規則な波を考慮したシミュレーションを行うことが重要である. 揺れながら風車が回転している時, 浮体式洋上風力発電システムにはジャイロ効果が発生する. 水槽と小型の浮体式風車を用いてジャイロ効果の影響を調べた実験では, 風車のジャイロ効果によって回転時と無回転時でシステムの動揺の固有周期が変化することや風車のタワー回りにヨー回転が発生することが報告されている[17][31]. また, 浮体式風力発電システムの運動をオイラー空間を用いて表現することで浮体式風力発電の複雑な振る舞いをより簡潔に表現できることが確認され, さらに風力発電システムの歳差速度と章動速度がシステムにかかるジャイロ負荷に影響を与えていることがわかった[18]. また, 静水中の浮体式洋上風力発電システムの一定風速における運動をシミュレーションによって解析した研究では, ジャイロ効果の影響によってSway, Roll, Yawの各運動が発生することが確認された[23][24]. ローターに働く風荷重を計算する場合, ローターを円盤として効力の公式から考えることができる. しかし, この計算方法ではローターの回転がシステムの運動に与える影響を考慮することができないため, この研究では翼素運動量理論を用いてローターに働く風荷重を計算を行っている. この研究で行われたシミュレーションは風の変動や波の影響を考慮していない. そのため, より現実的な浮体式洋上風力発電システムの運動解析を行うために, 風の変動や波を考慮してシミュレーションを行う必要がある. 浮体式洋上風力発電のシミュレーションでは空力学だけでなく水力学的な振る舞いを考慮する必要がある. そのため、浮体式洋上風車の小型模型を用いた実験で計測した粘性負荷や応答増幅比などのデータとの比較からシミュレーションの改良が進められている[20]洋上風力発電の疲労負荷に関する研究でも, 疲労が生じる原因として風荷重と波荷重という二つの要因があるため, 空力学的, 水力学的な考察が必要である. 風速と波の波高や周期との間には相関があり, その相関を考える手法として風速と波の波高, 周期の関係を示した散布図のデータを用いる方法がある. この風速と波の相関を用いて, 着床式洋上風力発電の疲労荷重のシミュレーションによる解析も行われている[25]. ヨー制御に関しては, PD制御の代わりにFuzzy制御によるヨー駆動が提案されている[30]. Fuzzy制御では位置誤差と速度誤差をそれぞれの値によって5つの状態に割当て, それらの状態の組み合わせによってヨー駆動に必要な入力を決定しており, PD制御と比較してより良い過渡特性を得られることが示されている. この他に, 強く安定した風を求めて陸地から離れるほど送電設備の建設費用が増加し, 発電コストが上がってしまうことも -->洋上風力発電特有の問題である.
研究目的
本研究ではジャイロモーメントに注目する. ジャイロモーメントはロータ回転と発電設備の動揺によって発生し, ヨーシステムなど発電設備の耐久性に影響を与えるため抑制されることが望ましい. しかし, 多くの先行研究においてジャイロ効果の影響は考慮されておらず, ジャイロ効果が浮体式洋上風力発電に与える影響については議論が不十分である. そこで本研究ではジャイロモーメントの影響を考慮した浮体式洋上風力発電モデルを構築し, ジャイロモーメントが浮体式洋上風力発電に与える影響の解析を行う. そして, 出力一定の条件下における動揺抑制とジャイロモーメント抑制を同時に達成するブレードピッチ角制御手法の提案を行い, 数値シミュレーションによって動揺抑制とジャイロモーメント抑制の間にあるトレードオフの関係について示す.
研究結果
まず, 多対拘束系(マルチボディダイナミクス)解析の手法を用いて, ジャイロモーメントを考慮した浮体式洋上風力発電システムのモデル化を行った. モデル化する浮体式洋上風力発電システムのタイプは, 世界的に実用化が進んでおり構造もシンプルであるスパー型とし, スパー型浮体式洋上風力発電システムをロータ, ナセル, タワー, 3つの剛体がそれぞれ互い拘束を受けながら運動するシステムとみてモデル化を行った. また, 本研究ではロータが3枚のブレードによって構成されるとし, 3枚の各ブレードのピッチ角を制御入力として用いた. その結果, ブレード角度を一定に保ち制御を全く行わなかった場合には, 発電設備が大きく揺れ傾き, タワーのヨー方向回りにはジャイロモーメントが発生することがわかった.

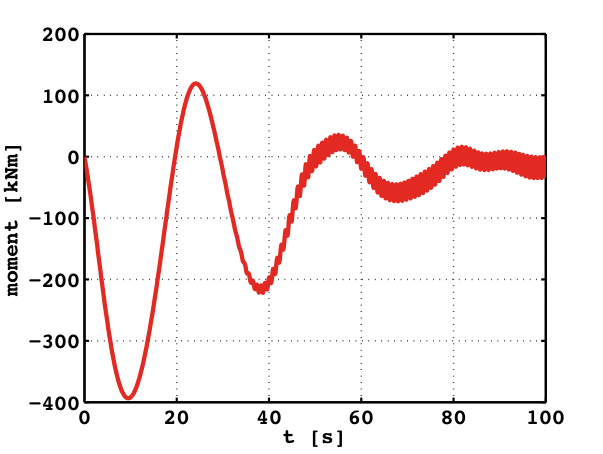
発電設備の傾きは風車ロータが風と正対しなくなるため発電効率の低下につながり, 発電設備の動揺とジャイロモーメントの発生は発電システムの稼働年数を低下させる原因となる. そこで, これらの問題を解決するために本研究では個別ブレードピッチ角制御を用いて出力一定の条件のもと, 動揺抑制とジャイロモーメント抑制を同時に達成する制御を行った. これは3枚のブレードのブレードピッチ角をそれぞれ制御入力とし, 3つの制御入力によって出力一定, 動揺抑制, ジャイロモーメント抑制という3つの制御目標を同時に達成させるという考えである. このとき, ジャイロモーメントを抑制する割合を示す"ジャイロモーメント抑制率"を導入し, この値を変えながらシミュレーションを行った. その結果, ジャイロモーメント抑制率の値が小さいときは短時間で発電設備の動揺が抑制されるがタワーのヨー方向回りに働くジャイロモーメントの抑制は十分に行われないことが確認された. また, ジャイロモーメント抑制率の値が大きいときはタワーのヨー方向回りに働くジャイロモーメントが良く抑制される一方で, 発電設備の動揺抑制には時間がかかることが確認された. これらの結果より, 個別ブレードピッチ角制御を用いた, 浮体式洋上風力発電の動揺抑制とジャイロモーメント抑制にはジャイロモーメント抑制率に関してトレードオフの関係にあると言える. 原因として, ジャイロモーメント抑制率が大きいときに動揺抑制とジャイロモーメント抑制を同時に達成するブレードピッチ角が現実的でない値をとるときがあることがあげられる. その場合には出力一定の条件のもとでジャイロモーメント抑制のみを考慮したブレードピッチ角制御を行っており, そのためジャイロモーメント抑制率が大きい場合には動揺抑制に時間がかかってしまっていると考えられる.


今後の課題
今後の課題は, 最適なジャイロモーメント抑制率の決定方法を考えることと, 浮体式洋上風力発電と波力発電を融合させた新しい発電システムの構築である. 特に浮体式洋上風力発電と波力発電を組み合わせた発電システムは, 洋上で発電を行う二つの発電方式を組み合わせることで送電設備などの設備を共有し発電コストの低減が期待される. 以下に, 波力発電及び浮体式洋上風力発電と波力発電の融合について簡単に説明する.
波力発電
波力発電にはいくつかの発電方式があり振動水柱型, 可動物体型, 越波型に大別される. 振動水柱型は装置内に空気室を設け波の上下運動によって生じる空気の振動流を用いて空気タービンを回転させ発電する[2]. 可動物体型は波のエネルギーによって可動物体を動かし, その運動エネルギーを用いてタービンを回し発電する. 可動物体型の波力発電はさらにいくつかの種類に分かれ, 海面に浮かぶブイが波によって上下に揺れる運動を利用して発電を行うポイント・アブソーバー式[3], [10]や, 海中に設置した受圧板で受けた波のエネルギーを振り子運動エネルギーに変換しそのエネルギーを利用して発電を行う振り子式などがある. 越波型は波を貯水池などに越波させ海水を貯め, 貯水池と海面の高低差を利用して排水によって水車を回し発電を行う方式である.
先行研究
ポイントアブソーバー式波力発電は波によって得られたエネルギーを電力に変換するPTO(power take-off)装置のパラメータの決め方によって, passive control, complex-conjugate control, intermediate reactive controlなど複数の制御手法が存在する. 波の波高や角周波数によってPTO装置のパラメータを調節し, 波の変化に応じて最適な制御手法を選択する制御戦略が研究されている[22]. シミュレーションでの不規則波にはBretschneider spectrumを用いている. その他の研究では限られたスペース内に複数のブイを出力が最大となるように配置する研究なども行われている[9].
浮体式洋上風力発電と波力発電の融合
洋上風力発電は外洋に行くほど強く安定した風によって発電量が増加する一方で, 発電した電力を陸地に送る送電設備などの建設コストが大きくなってしまう問題がある. この問題を解決する方法として, 洋上風力発電と波力発電を同時に行う発電システムの研究, 開発が行われている[7], [8]. 風力と波力という二つの発電方式を組み合わせることでシステム全体の建設コストに対する発電量を大きくすることが期待される. また, 可動物体型の"Front Pivot Hinged Wave Absorber"式の波力発電装置を浮体式風力発電の基礎部分に用いると波力発電装置が波の運動エネルギーを吸収するため, 風力発電の耐久性や発電効率への影響が懸念される発電装置全体の動揺が抑制される. さらに, 風力タービンが風から受ける圧力が基礎部分である波力発電装置を押さえつけ, 安定性が増すことで波力発電の出力も増加する[11]. 今後は, 洋上風力と波力の複合発電をより発展, 普及させるために, それぞれの発電方式の特徴や利点を生かす技術の研究, 開発が必要である.
参考文献
[1] H. Hashimoto, “Output optimization of wind energy systems with extremum seeking control," 東京工業大学学士論文, 2009.
[2] M. Hamamoto and Y. Terada, "Study on control of wells turbine for wave power generating system," 福井工業大学研究紀要 第33号, 2003.
[3] P. Ricci, J. Lopez, M. Santos, P. Ruiz-Minguela, J. L. Villate, F. Salcedo and A. F. deO. Falcao, "Control strategies for a wave energy converter connected to a hydraulic power take-off," IET Renew. Power Gener., vol. 5, pp. 234-244, 2011.
[4] B. Malinga, J. E. Sneckenberger and A. Feliachi "Modeling and control of a wind turbine as a distributed resource," in Proc. 35th Southeastern Symp. Syst. Theory, Morgantown, WV, 2003, pp. 108-112.
[5] "Hywind - the world's first full-scale floating wind turbine," http://www.statoil.com/en/TechnologyInnovation/NewEnergy/RenewablePowerProduction/Offshore/Hywind/Pages/HywindPuttingWindPowerToTheTest.aspx
[6] N. F. Jasim, "Pitch angle regulation of floating wind turbine with dynamic uncertainty and external disturbances," Int. Conf. Energy, Power and Control, pp. 245-249, 2010.
[7] "Floating power plant," http://www.floatingpowerplant.com/
[8] J. Beerens, "Offshore hybrid wind-wave energy converter system - a frequency domain approach -," master of science thesis, Delft University of Thechnology, 2010.
[9] G. De Backer, M. Vantorre, C. Beels, J. De Rouck, and P. Frigaard, "Power absorption by closely spaced point absorbers in constrained conditions," IET Renew. Power Gener., vol. 5, pp. 579-591, 2010.
[10] V. Gomez, R. Guanche, C. Vida, and I. Eguinoa, "Numerical simulation of a submerged wave energy converter under irregular wave condition," Proc. OCEANS - Spain, pp. 1-10, 2011.
[11] "When floating structures combine wind and wave," http://www.lorc.dk/Knowledge/Wind/Support-structures/Floating-structure-combining-wind-and-wave
[12] S. Bhowmik, R. Spee, and J. H. R. Enslin, "Performance optimization for doubly fed wind power generation systems," IEEE Trans. Ind. Appl., vol. 35, no. 4, pp. 949-958, 1999.
[13] O. Barambones, P. Alkorta, and M. De La Sen, "Wind turbine output power maximization based on sliding mode control strategy," IEEE Int. Symp. Ind. Elect., pp. 364-369, 2010.
[14] S. Morimoto, H. Nakayama, M. Sanada, and Y. Takeda, "Sensorless output maximization control for variable-speed wind generation system using IPMSM," IEEE Trans. Ind. Appl., vol. 41, no. 1, pp. 1464-1471, 2003.
[15] J. M. Jonkman, "Influence of control on the pitch damping of a floating wind turbine," 2008 ASME Wind Energy Symp., 2008.
[16] S. Christiansen, T. Knudsen and T. Bak, "Optimal control of a ballast-stabilized floating wind turbine," IEEE Int. Symp. CACSD, pp. 1214-1219, 2011.
[17] M. Murai and R. Nishimura, "A study an experiment of behavior of a spar type offshore wind turbine considering rotation of wind turbine blades," IEEE OCEANS - Sydney, pp. 1-8, 2010.
[18] B. Sweetman and L. Wang, "Floating offshore wind turbine daynamics : Large-angle motion in euler-space," J. Offshore Mechanics and Arctic Eng., 2011.
[19] C. W. Wang, T. Utsunomiya, S. C. Wee and Y. S. Choo, "Research on floating wind turbine: a literature survey," The IES Journal Part A: Civil & Structural Engineering , pp. 267-277, 2010.
[20] S. Gueydon and W. Xu, "Floating wind turbine motion assessment," IEEE OCEANS, pp. 1-10, 2011.
[21] X. Ye, L. Zhang, H. Wu, and J. Zhao, "Study to motion response of floating wind turbine under the turbulent wind," Int. Conf. ICECE, pp. 3683-3686, 2011.
[22] E. Tedeschi and M. Molinas, "Control strategy of wave energy converters optimized under power electronics rating constraints," Int. Conf. on Ocean Energy, pp. 1-6, 2010.
[23] H. Matsumura and T. Utsunomiya, "Motion analysis of a floating offshore wind turbine considering rotor-rotation," The IES Journal Part A: Civil & Structual Engineering, pp. 268-279, 2008.
[24] Peter C. Hughes, "Spacecraft attitude dynamics," John Wiley & Sons Inc, 1986.
[25] J. Sheng and S. Chen, "Fatigue load simulation for foundation design of offshore wind turbine due to combined wind and wave loading," World Non-Grid-Connected Wind Power and Energy Conference (WNWEC), pp. 1-6, 2010.
[26] H. Guo, X. Lu and T. Qiu, "Research on pitch control of floating offshore wind turbines," 9th Int. Conf. FSKD, pp. 2966-2970, 2012.
[27] F. Bu, W. Huang, Y. Hu, Y. Xu, K.Shi amd Q. Wang, "Study and implementation of a control algorithm for wind turbine yw control system,"WNWEC 2009, pp. 1-5, 2009.
[28] R. Lanzafame and M. Messina, "Fluid dynamics wind turbine design : Critical analysis, optimization and application of BEM theory," Renew Energy, pp. 2291-2305, 2007.
[29] H. Choi, J. Kim, J. Cho and Y. Nam, "Active yaw control of MW class wind turbine," ICCAS, pp. 1075-1078, 2010.
[30] K. C. Wu, R. K. Joseph and N. K. Thupili, "Evaluation of classical and fuzzy logic controllers for wind turbine yaw control," Aerospace Control Systems, Proc. IEEE Regional Conference, vol. 1, pp. 254-258, 1993.
[31] N. Mostafa, M. Murai, R. Nishimura, O. Fujita and T. Nihei, "Study of motion of spar-type floating wind turbines in waves with effect of gyromoment at inclination," Journal of Naval Architecture and Marine Engineering, pp. 67-79, 2012.
[32] V. Petrovic, M. Baotic and N. Peric, "Reduction of wind turbine tower oscillations based on individual pitch control," 20th Mediterranean Conf. on Control & Automation, pp. 1499-1505, 2012.
[33] A. Pintea, H. Wang, N. Christov, P. Borne and D. Popescu, "Modeling and power regulation of horizontal variable speed wind turbine," Studies in Infomatics and Control 20, 3 (2011) 93, 2011.
[34] T. Senjyu, R. Sakamoto, N. Urasaki, T. Funabashi, H. Fujita and H. Sekine, "Output power leveling of wind turbine generator for all operating regions by pitch angle control," IEEE Transactions on Energy Conversion, vol. 21, no. 2, 2006.
[35] E. A. Bossanyi, "Individual blade pitch control for load reduction," Wind Energy, vol. 6, pp. 119-128, 2003.
[36] G. J. van der Veen, I. J. Couchman and R. O. Bowyer, "Control of floating wind turbine," American Control Conference, pp. 3148-3153, 2012.