研究背景と目的
近年,携帯端末による位置情報の取得[1]や地殻変動の監視など,衛星を用いた測位システムの重要性が増している[2,3].しかし,GPS などの位置測位システムでは,衛星と地上局との間に障害物が存在する場合,受信する電波が弱まってしまうため,山間部や都市部において測位の精度の劣化が問題となる.精度の高い位置測位を行うためには,天頂付近に衛星があることが必要となるが,そこで注目されているのが準天頂衛星システムである[4-6].準天頂衛星システムは,特定の地域の天頂に衛星を配置させることにより,測位の精度を高めるシステムである.準天頂衛星は静止軌道面から傾いた軌道を周回するため,測位を行う地域の上空を一定時間通過することができる.そのため,障害のない通信が可能となり,高精度測位が可能となる.しかし,準天頂衛星は観測地域の上空を時々刻々移動しているため,1つの衛星が特定の地域の上空に留まることができない.測位を常時可能にするためには,複数機の衛星を用いて常に1機以上の衛星を上空に配置させる必要がある.そこで,本研究では複数機からなる準天頂衛星の制御を行なう.また,衛星数の増加から,衛星の制御を地上局で集中して行なうことが,今後さらに複雑になると予想される.そのため,複数機の衛星が自律的に制御を行なうシステムの必要性が高まっており,近年,衛星のフォーメーションフライトに関する研究が精力的に行なわれている[7-9].衛星のフォーメーションフライトのように,複数の制御対象がお互いの状態を利用しあいながらシステム全体の目標を達成する制御のことを協調制御という.本研究では準天頂衛星の協調制御について考える.協調制御は自然における鳥や魚などの群れの行動[10] に見られる同期現象[11] の解析をきっかけに,盛んに研究されてきた.協調制御の代表的な問題として,コンセンサス問題や被覆問題[12,13]などが挙げられる.コンセンサス問題とは,複数ある制御対象がそれぞれ持つ状態量のうち,ある状態量を共通の値に収束させる問題である.先行研究では,コンセンサス問題を考えることにより,エージェントの位置や速度の相互調整を行うことでエージェント群の運動を一定に収束させ[14],渦状のフォーメーション[15] や複数のパターンのフォーメーションへの変形[16],さらに,姿勢の同期[17] などを可能にしている.状態の収束の様子は,制御対象間のネットワークの繋がり方に依存しており,コンセンサスを達成するうえでネットワークの構造が重要となる[18].本研究ではすべての衛星同士が通信可能な完全ネットワークであると仮定して研究を行なう.コンセンサス問題を応用すれば,複数機の衛星を用いた大規模なシステムを一拠点で集中管理する必要がなくなり,衛星間のみの情報のやりとりを用いてシステムを制御することができる.よって,本研究ではコンセンサス問題を考えることで衛星のフォーメーション制御を行なう.本研究におけるいて最終的に達成するべきコンセンサスは,衛星の運動を決めるいくつかのパラメータを目標の値に収束させることによって,特定の地域において準天頂衛星による通信を常時可能にするフォーメーションを構成することである.
準天頂衛星
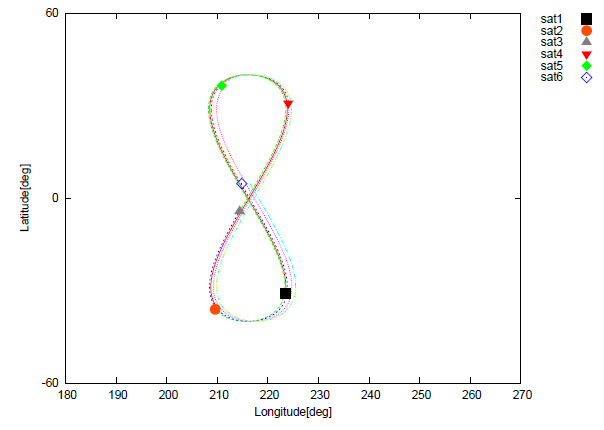
地球を周回する衛星が軌道傾斜角を持ち,さらに,衛星の公転周期が地球の自転周期と等しいとき,この衛星を準天頂衛星とよぶ.準天頂衛星はある特定の地域の上空を一定時間とどまることができ,別名8の字衛星と呼ばれる.これは,衛星が地表直下点に描く軌跡が以下の動画のように,8の字になるからである.このような軌跡を描く理由は,衛星が一定の経度で南北方向に往復運動するのではなく,経度を変えながら南北を往復するためである.経度が変化するのは,地軸と衛星との距離により衛星の地軸周りの公転速度が変化するためであり,高緯度では地球の自転速度が遅いため衛星が地表を追い抜き,低緯度では地表が衛星を追い抜き東西を往復する.このため,準天頂衛星は8の字軌跡を描く.
(左クリックで視点を動かせます)
制御手法
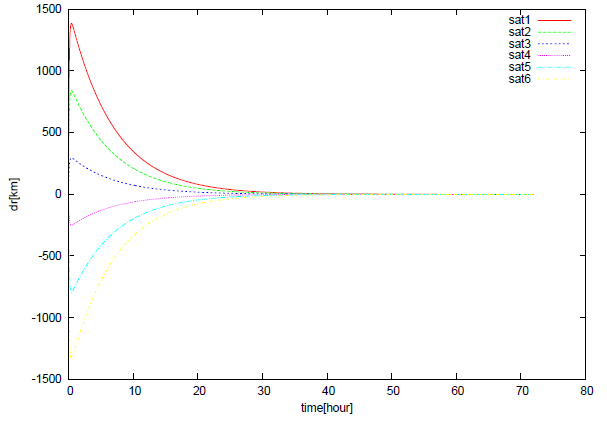
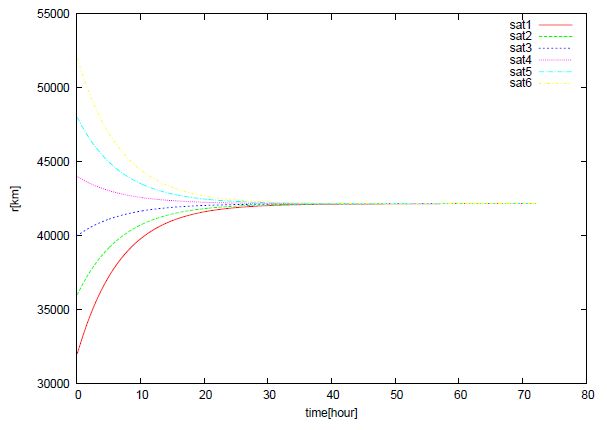
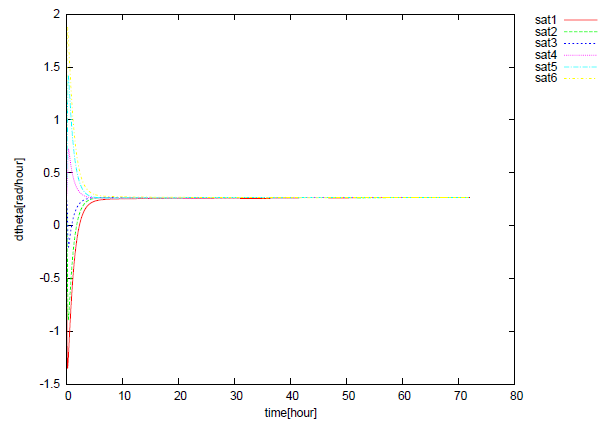
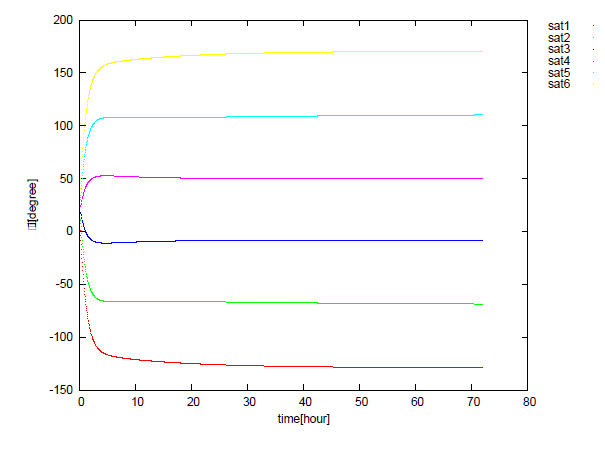
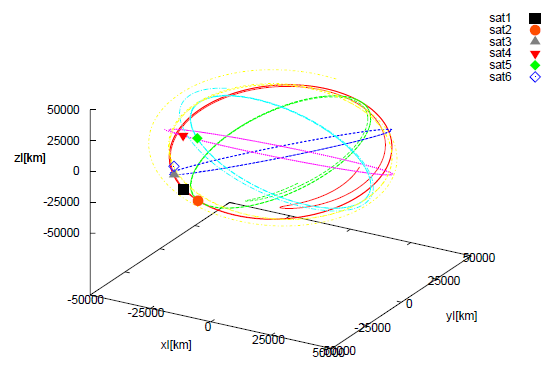
衛星のフォーメーション制御をおこなうためには,軌道面の制御と,軌道上を周回する衛星の位相の制御が必要である.本研究では軌道面が目標を達成していると仮定し,衛星の位相の制御をおこなう.位相の制御では,同一軌道面内にある複数機の衛星が,Balanced circular formation [20] と呼ばれる円環等方配置を形成するためのポテンシャル関数[21, 22] を用いて制御手法を構築する.さらに,システムの漸近安定性をリアプノフの安定論に基づき示し,提案した制御手法によって衛星が目標のフォーメーションへと収束することを示す.以上の制御手法を用いて準天頂衛星のフォーメーション制御を行なう.数値シミュレーションによって,提案手法が有用であることを以下に示す.
まとめと今後の課題
本研究では準天頂衛星のフォーメーション制御を行なうために,軌道面を固定した複数機の衛星について,軌道半径rを静止軌道半径に,真近点角θを等間隔にする制御手法を構築した.入力には等間隔配置を行うのに都合の良いポテンシャル関数を用いた.また,リアプノフの直接法と,ラサールの不変性原理を用いることにより,システムが目標の状態に漸近的に収束することを示した.さらに,数値シミュレーションによってもシステムが目標のフォーメーションを形成することを確かめた.
本研究で提案した手法は,軌道面の制御を行った後に,軌道を周回する衛星の位相の制御を行っているため,衛星の燃料やフォーメーションを達成するまでの時間を考慮すると,冗長な制御であるといえる.そのため,今後の課題として,目標のフォーメーションに最短距離で達成できるような入力を考える必要がある.また,本研究では真円に近い軌道を周回すると仮定したので,より一般的な場合を考え,衛星に離心率e,近地点引数ωを持たせて楕円運動を行う場合のフォーメーション制御への拡張も今後の課題である.
参考文献
[1] J. J. Spilker, B. W. Parkinson, "Global positioning system : theory and applications I," progress in astronautics and aeronautics, vol. 163, 1996.
[2] JAXA ウェブ準天頂衛星システム(http://qzss.jaxa.jp/).
[3] 情報通信研究機構人工衛星軌道の研究(http://spacecom.nict.go.jp/control/index-j.html).
[4] T. Tsujino, "Effectiveness of the quasi-zenith satellite system in ubiquitous positioning," Science & Technology Trends, Quarterly Review, no. 16, pp. 88-101, 2005.
[5] I. Kawano, "Constellation design and GPS augmentation effect of quasi-zenith satellite system," JSASS, vol. 51, no. 593, pp. 307-313, 2003.
[6] F. Wu, N. Kubo, and A. Yasuda, "Performance analysis of GPS augmentation using Japanese quasi-zenith satellite system," Earth, Planets and Space, vol. 56, pp. 25-37, 2004.
[7] A. M. Joshi and K. Khorasani, "A nonlinear control design technique for formation flight of a constellation of satellites," in Proc. IEEE Conf. Contr. App., pp. 108-113, August 2005.
[8] H. Schaub, S. R. Vadali, J. L. Junkins and K. T. Alfriend, "Spacecraft formation flying control using mean orbit elements." AAS Journal of Astronautical Sciences, vol. 48, no. 1, pp. 69-87, 2000.
[9] D. Izzo and L. Pettazzi, "Autonomous and distributed motion planning for satellite swarm."J. Guid. Contr. Dyn., vol. 30, no. 2, pp. 449-459, 2007.
[10] C. W. Reynolds, "Flocks, herds, and schools: A distributed behavioral model," Computer Graphics, vol. 21, no. 4, pp. 25-34, 1987.
[11] Z. Neda, E. Ravasz, Y. Brechet, T. Vicsek, and A.-L. Barabasi, "Self-organizing processes: The sound of many hands clapping," Nature, vol. 403, pp. 27, 2000.
[12] S. Martinez, J. Cortes, and F. Bullo, "Motion coordination with distributed information," IEEE Contr. Syst. Mag., vol. 27, no. 4, pp. 75-88, 2007.
[13] J. Cortes, S.Martinez, T. Karatas and F. Bullo, "Coverage control for mobile sensing networks," IEEE Trans. on Robotics and Automation, vol. 20, No. 2, pp. 243-255, 2004.
[14] H. G. Tanner, A. Jadbabaie, and G. J. Pappas, "Stable flocking of mobile agents, part I: fixed topology," in Proc. IEEE Conf. Dec. Contr., pp. 2010-2015, December 2003.
[15] M. H. Mabrouk and C. R. McInnes, "Non-linear stability of vortex formation in swarms of interacting particles," Phys. Rev. E, vol. 78, 012903, 2008.
[16] B. Derek and C. R. McInnes, "Pattern transition in spacecraft formation flying via the artificial potential field method and bifurcation theory," International Symposium on Formation Flying, 2008.
[17] A. Abdessameud and A. Tayebi, "Attitude synchronization of a group of spacecraft without velocity measurements," IEEE Trans. Autom. Contr., vol. 54, pp. 2642-2648, 2009.
[18] J. A. Fax and R. M. Murray, "Consensus and cooperation in networked multi-agent systems," Proc. IEEE, vol. 95, no. 1, pp. 215-233, 2007.
[19] J. J. Spilker, "Satellite constellation and geometric dilution of precision, global positioning system : theory and applications I chapter 5," Progress in Astronautics and Aeronautics, vol. 163, 1996.
[20] G. Jing, Y. Gangfeng, L. Zhiyun, "Balanced circular formation control based on gossip communication and angle of arrival information" Control Conference Chinese, pp. 6036-6041, 2011.
[21] C. R. McInnes, "Autonomous ring formation for a planar constellation of satellites," J. Guid. Contr. Dyn., vol. 18, pp. 1215-1217, 1995.
[22] H. Umehara, "Potential-function guidance forming eccentricity separation of satellites with continuous thrust," JSASS, vol. 49, pp. 438-440, 2001.