矢田 祐介
1.はじめに
近年,我が国では都市部において慢性的に交通渋滞が発生している.
交通渋滞は,時間のロスによる経済損失や排気ガス,騒音による交通公害など我々の生活に様々な悪影響を与えており,
渋滞問題の解決は急務とされている.
交差点において,交通需要が交通量を超過したとき,交通流は過飽和状態となり交通渋滞が発生する.
さらに,渋滞が延伸し,隣接する上流交差点まで達すると上流交差点からの流入は滞り,新たな渋滞を発生させる.
この現象は「先詰まり」と言われ,渋滞を加速させる原因となっている.
交通需要の多い都市部では「先詰まり」により発生する渋滞も多く,渋滞問題を解決する上で「先詰まり」に関する研究意義は大きい.
現在,交通渋滞に対して道路整備や交通規制,交通信号制御,動的経路誘導[1]などの対策が行われている.
本研究では交通信号制御に関する観点から「先詰まり」に着目した渋滞緩和に関するアプローチの検討を行う.
2.先行研究
交通信号制御について
交通信号制御とは,交通量や車両台数などの交通情報を基に信号機の状態(青,赤など)を制御するものである.
一般的に,サイクル長,スプリット,オフセットと呼ばれる3つの信号制御パラメータを制御量とすることが多いが,信号機の状態を離散変数(例えば青信号を1,赤信号を0とする変数)として表し,信号機の状態を直接制御量とすることもある[2].
ここで,サイクル長は信号表示が一巡するのに要する時間,スプリットはサイクル長に対する青時間の比率,
オフセットは隣接信号間での青信号開始時間の差を指している.
集中制御と分散制御
現行の信号制御システムでは中央コンピュータにより統括された集中制御方式で制御されている.
集中制御方式では制御エリア全体の交通量を最適化することが可能であるが,大規模な道路網では処理情報が膨大で,リアルタイム制御が困難である.
また,一部の通信回線や制御系の故障,交通網の変更などにより制御系全体が影響を受け,その度に制御系の再計画が必要になる.
これに対し,近年,自律分散的に信号機を制御する手法も提案されている[3-6].
分散制御方式では各信号機近傍の局所エリアにおける交通量を最適化するため全エリアの最適解に収束する保証はないが,集中制御方式に比べて制御計算に必要な情報が少なく,計算量も少ない.また,システムの拡張性にも優れている.大規模な道路網におけるリアルタイム制御を実現するのに有効である.
分散制御方式の先行研究として,[3-5]では非線形結合振動子モデルによる手法を提案している.
これらの手法では,信号の周期的な現示の変化を振動子の位相変化ととらえ,隣接信号同士の相互作用による制御を実現するために,
振動子の位相ダイナミクスに相互作用項を加えたモデルとなっている.
特に,[3]では,グラフ上の拡散方程式を用いて振動子系を設計することにより
3つの信号制御パラメータ(サイクル長,スプリット,オフセット)の同時制御を実現している.
また,マルチエージェントによりパラメータを学習する手法やファジー制御による手法[6]なども提案されている.
過飽和交通流における信号制御
過飽和状態の交通流では,渋滞により交差点に捌け残り車両が生じる.交差点に捌け残りが生じると大きな時間損失を生むため,過飽和交通流に対しては捌け残り車両を抑制することが重要である.
過飽和交通流における信号制御方式として,[7-9]が挙げられる.
文献[7]では捌け残り車両の台数の情報を含む負荷率という状態量を導入し,負荷率分布方式によって交差点における負荷率が均等になるようなスプリット制御を行っている.これはMODERATO制御と言われ,現行の信号制御に多く利用されている制御方式である.
文献[8,9]では捌け残り台数を渋滞緩和の指標とし,これを最小にするような信号制御パラメータを求めている.
具体的には,[8]では逐次的な探索アルゴリズムによりサイクル長,スプリット,オフセットを決定し,[9]ではLQ制御により最適なスプリットを求めている.
また,渋滞の延伸により発生する「先詰まり」の解消については,[10]で隣接上流交差点と連携制御を行うことの必要性が述べられている.しかし,具体的なアプローチの提案までは至っていない.
交通流モデル
交通流は一般的に,車群の動きに注目し交通流を圧縮性流体とみなしたマクロモデルや,個々の車の挙動を個別に扱ったミクロモデルで表現される.
マクロモデルは,制御問題に対して解析的なアプローチをとることができるため,交通信号制御の先行研究の多くはマクロモデルを利用している[2-9].
しかし,信号機で制御される道路は不連続な密度をもつため,この特徴をマクロモデルで表現するのは難しい.
一方,ミクロモデルは,車一台一台がモデルで表現されているため,交通特性を詳細に表現できるが,計算量が多くなることや制御問題に対し解析的なアプローチをとることが難しいという問題がある.
ミクロモデルを用いた信号制御の研究に[11]がある.
[11]では,個々の車両の位置情報から進行方向に対する青信号の要求度合い(デマンド)を求め,その総和が大きい進行方向を青信号にするという制御を行っている.
3.研究方針
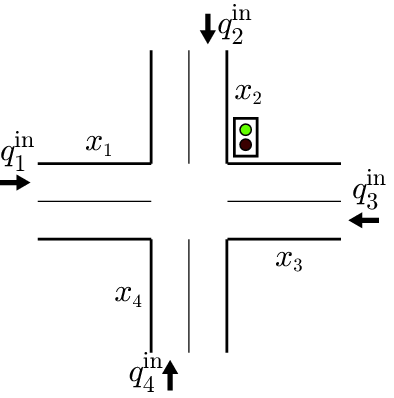
本研究では信号機を有する単一交差点および隣接2交差点に対し,「先詰まり」の事前防止を行うことで渋滞緩和を目指す.
具体的には,先詰まりを出来る限り送らせるために,交差点の各流入路に存在する車両台数の最大値を最小にするように制御する.
また,信号待ち車両と走行車両の密度の違いを表現可能な信号待ち車両の密度層と走行車両の密度層の2つの密度層を持つマクロ交通流モデルを提案する.
手順として,第一に隣接交差点の影響を無視した単一交差点(図1)において制御目標を実現するスプリットの設計を行う.
次に,隣接交差点の信号機の切り替わりを考慮した場合(図2)において信号機間のオフセットを踏まえた最適なスプリットの設計を行う.
その際に,最適解が存在するための流入交通量やサイクル長の条件についても考察する.
 |
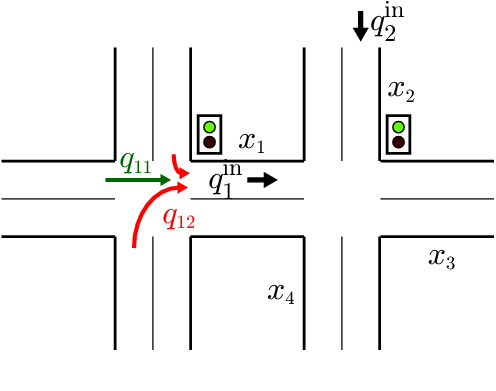 |
| 図1 単一交差点 | 図2 隣接2交差点 |
4.シミュレーション結果
本研究で設計したスプリットの性能を検証するため,単一交差点の場合においてシミュレーションを行った. 下の動画は交差点流入路を200[m],流入量を左側の流入口から時計回りに0.6[台/s],0.4[台/s],0.3[台/s],0.2[台/s],車両速度を14[m/s],最小車頭間距離10[m],サイクル長を30[s]としたときのシミュレーション結果である. 動画において、黄色いブロックは車両を表す。 また、交差点中央において赤と緑で縦横交互に流入路を塞ぐ2本の棒は信号機を表現し、塞がれた流入路はその方向が赤信号であることを示す (棒の色は横方向の道路が青信号か赤信号かを示す). 各流入路の付近に書かれた数字はその流入路に存在する車両台数を示す. 流入交通量の多い左側と上側の2つの流入路を見ると車両台数の上限が等しくなっており、極端な偏りを抑制できていることが分かる.
5.結論
本研究では,単一交差点および隣接2交差点に対し,各流入路における車両台数の上限を抑制することで先詰まりを事前防止する信号制御パラメータの設計を行った. また,最適解が存在するための流入交通量および信号制御パラメータの条件を求めた. 今後の課題として,3つ以上隣接交差点があるときの設計問題について検討すること,また,先詰まりの事前防止だけでなく発生後の先詰まりを抑制する制御手法を検討することが望まれる.
6.参考文献
| [1] | 社団法人新交通管理システム協会, http://www.utms.or.jp/index.html |
| [2] | T. Kato, Y. Kim, T. Suzuki, and S. Okuma, ``Model predictive control of traffic flow based on hybrid system modeling,'' IEICE Trans. Fundamentals, vol. E88-A, no. 2, pp. 549-560, 2005. |
| [3] | 杉正夫, ``グラフ上の反応拡散方程式による交通信号網の自律分散型制御,'' 平成14年学位論文, 東京大学, 2003. |
| [4] | 西川郁子, 中澤重人, 喜多一, ``位相モデルによる信号機広域制御ダイナミクスの提案,'' 計測自動制御学会論文集, vol. 39, no. 2, pp. 199-208, 2003. |
| [5] | S. Lämmer, H. Kori, K. Peters, and D. Helbing, ``Decentralised control of material or traffic flows in networks using phase-synchronisation,'' Physica A, vol. 363, pp. 39-47, 2006. |
| [6] | J.-H. Lee and H. Lee-Kwang, ``Distributed and cooperative fuzzy controllers for traffic intersections,'' IEEE Trans. Syst. Man Cybern. C, vol. 29, no. 2, pp. 263-271, 1999. |
| [7] | 社会法人 交通工学研究会, ``改訂 交通信号の手引,'' 2006. |
| [8] | 清水光, 真柴博樹, 傍田祐司, 小林正明, ``幹線道路の渋滞長制御,'' 情報処理学会論文誌, vol. 42, pp. 1876-1884, 2001. |
| [9] | 若佐裕治, 岩岡浩一郎, 花岡健一郎, 田中幹也, ``実時間広域交通信号制御への制御工学的手法の適用,'' 計測自動制御学会論文集, vol. 42, no. 9, pp. 1076-1082, 2006. |
| [10] | 三村慎司, 久井守, ``過飽和系統信号ネットワークのリアルタイム制御論理の構築の試み,'' 山口大学工学部研究報告, vol. 57, no. 1, 2006. |
| [11] | Y. Imai, Y. Kato, and T. Hasegawa,``Advanced Demand Signals Scheme,'' Electr. Commu. Japan, Part 3, vol. 89, vo. 1, 2006. |
平成22年3月31日更新