研究背景と目的
宇宙機のフォーメーションフライト
近年,宇宙機のフォーメーションフライト技術への関心・需要が高まっている.宇宙機のフォーメーションフライト技術とは, 複数の宇宙機が各々の状態量の一部(もしくは全部)を一致した状態に保つことで, 協調してミッションを行うことを可能とする技術である. 複数衛星運用による機能拡張の容易さ・高い耐故障性といった長所があり, 多点観測ミッションなどの単機で行うことが困難なミッションへの適用や,宇宙建造物の大型化に歯止めをかけ,製造・打ち上げコストを削減することなどが期待されている. 現在,宇宙太陽光発電衛星への応用[1]をはじめ,宇宙プラズマ現象の多点同時観測衛星「SCOPE」や,NASAの「Starlight」,EAの「DARWIN」など,国内外で多数のフォーメーションフライト技術を用いたミッションが提案されているが[2],各々の宇宙機に働く重力や遠心力の差など,重力場特有の外乱要素の問題から, 各宇宙機が至近距離にて小規模なフォーメーションを形成する問題を扱っているものがほとんどである[3].
保存量に着目したコンセンサス問題
中心力によるポテンシャルが存在しない自由空間内での並進運動について,制御器によってマス=スプリング=ダンパシステムを模擬的に形成することで,各エージェントの位置と速度についてコンセンサス(合意)を得ることができるという基本的な原理が知られている\cite{Tanner}.複数機の移動体に, それぞれが取得できる相対位置・相対速度を単純に重ね合わせ, 負の符号をつけたものを入力として加える. このとき, システム全体の位置・速度を状態量とするエネルギー関数は減少関数となり, 目標のコンセンサスが達成されることが示されている. ここで注意すべきことは,各エージェント間に作用する力の間には作用・反作用の関係があり,その結果システム全体としては運動量が保存されていることにある.このシンプルな制御機構は筆者らによって剛体衛星の回転運動にも応用され,単に回転運動のコンセンサスを得るだけでなく,システム全体の角運動量を保ちながら,ある同一軸周りに周期的で一様な回転を与えられることが示されている\cite{Gajan}. 本論文では,各宇宙機が任意の地球周回軌道上を周回する場合に, システム全体の面積速度(地球周りの角運動量)を保ちながらコンセンサスを得るための手法を提案する. 目標とするコンセンサスは, 楕円軌道のパラメータの一部を一致させる位相コンセンサスと, 位置・速度を一致させる完全コンセンサスの2種類とする. また, 推進力にはスラスターの使用を想定し, システムへの制御入力はインパルス入力の形で加えることとする. 世界規模での人口増加, 生活の急速な機械化・電子化によってエネルギー需要は拡大の一途を辿っている. その一方, 化石燃料の枯渇や環境への悪影響などの問題が顕在化しており, 将来のエネルギー不足が危惧されている. こうした問題を解決するための方策として, 宇宙太陽光発電への関心が高まっている. 宇宙太陽光発電とは, 宇宙空間において太陽光受光パネルを展開し, 太陽光発電を行うことによって得られる電力をマイクロ波に変換して, 地上のアンテナに向けて送信した後, 再び電力へ変換するという仕組みの発電方法のことを指す. 発電源として太陽光を利用するため, 環境負荷の低減や資源の枯渇リスク解消といった利点がある. さらに, 地上設置型の太陽光発電は, 日時や気候によって発電量が不規則に変化するという問題があるが, 宇宙太陽光発電では常に安定した電力供給が可能であるため, 基幹電力としての利用も期待されている[1]. 宇宙太陽光発電の実現に向けては様々な研究が行われているが, 近年新しく提案されたコンセプトに宇宙機のフォーメーションフライトを利用した宇宙太陽光発電がある[2]. 文献[3]では, 独立した受光パネル衛星と発送電モジュール衛星をフォーメーション飛行させることで, 故障要因となりやすい結合トラス部を必要としないシステムを提案しているなど, 具体的なシステムの構想も進められている.
先行研究
本節では, 本研究の先行研究として, 宇宙機のフォーメションフライト技術に関する研究, およびフォーメーション制御理論で近年関心を集めている問題を紹介する.
宇宙機のフォーメーションフライト
宇宙機のフォーメーションフライト技術とは, 複数の宇宙機が一定の相対速度・相対位置を維持するように飛行をさせ, 協調してミッションを行うことを可能とする技術である. 多点観測ミッションなどの単機で行うことが困難なミッションへの適応や, 大型宇宙建造物の代用システムとしての利用や, 製造・打ち上げコストを削減することなどが期待される他, 機能拡張の容易さ, 高い故障耐性といった長所を持っている. 現在, 宇宙プラズマ現象の多点同時観測衛星「SCOPE」[4]や, NASAの「Starlight」, ESAの「DARWIN」など, 国内外で多数のフォーメーションフライト技術を用いたミッションが提案されている[5]が, 各々の宇宙機に働く重力や遠心力の差など, 重力場特有の外乱要素の問題から, 各宇宙機が至近距離にて小規模なフォーメーションを形成する問題を扱っているものがほとんどである.
コンセンサス問題
コンセンサス問題とは, 移動体間の相対状態に関する情報を利用し, 各移動体の状態量を一つの値に収束させるフォーメーション制御問題である. 各移動体が局所情報を用いて, 特定の区域の包囲や目標物の捕獲など, 工学実用性の高い研究が多数行われている[6]. 中心力によるポテンシャルが存在しない自由空間内での並進運動では, 制御器によってマス=スプリング=ダンパシステムを模擬的に形成することで,各エージェントのコンセンサス(合意)を得ることができるという基本的な原理が知られている[7]. ここで注意すべきことは, 各エージェント間に作用する力の間には作用・反作用の関係があり, その結果システム全体としては運動量が保存されていることにある. このシンプルな制御機構は筆者らによって剛体衛星の回転運動にも応用され, 単に回転運動のコンセンサスを得るだけでなく, システム全体の角運動量を保ちながら, ある同一軸周りに周期的で一様な回転を与えられることが示されている[8].
ケプラー運動する宇宙機の制御問題
ケプラー軌道を周回する宇宙機の制御問題を考えるうえで, ケプラー軌道特有の性質を用いることは有効である. 楕円軌道上での宇宙機の周回運動では, 宇宙機の位置や速度, 地球中心座標系からみた宇宙機の角度を時間の陽関数として表すことが困難である. ここで離心近点角とよばれる, 楕円軌道の長軸と, 楕円軌道の中心とある時刻での宇宙機の位置を結ぶ線分のなす角度を用いることで, 宇宙機の位置, 位相と時間を対応付けることができる[9]. 文献[10]では, 衛星の位置, 速度を, 離心近点角についてのダイナミクスとして定式化し, 制御をしている. また, 文献[11]では, 軌道の長軸半径, 離心率などを状態変数として, 制御を行っている.
インパルス制御による軌道移行
スラスタ燃料は, 衛星の寿命を決定する重要な要素であり, 衛星の軌道制御は適切なタイミングで適切な量の噴射をかけるインパルス・スラスト方式で行われるのが一般的である. 代表的なインパルス・スラストによる軌道移行法として, 異なる円軌道間の移行に必要な速度変化を与えるインパルス・ホーマン移行が広く知られている. 円軌道以外の軌道間でのインパルス移行計画は, ランベール問題を解くことで求められる. ランベール問題とは, 始点と終点の位置情報, および飛行にかかる時間から, 遷移軌道を求める問題である. 文献[12]では, ランベール問題において, 入力を最小にする軌道の求め方が示されている.
衛星間の相対軌道をインパルス・スラストによって制御する研究も行われている. 文献[13]では, 衛星間の相対位置を制御する際, 入力を最小にする方法が提案され, [14]では, 摂動によって生じる軌道要素の変化をインパルス・スラストによって抑制する手法が研究されている. また, 文献[15,16]のようにインパルス・スラストを加えることでフォーメーションの大きさを変更する研究も行われている.
しかし, これらの手法では入力を加える時刻を考慮せず, 二回のインパルスを加えて宇宙機の軌道移行を行うため, 不要な燃料を消費する可能性も指摘されている.
研究目的
系の総角運動量の保存を考慮したコンセンサス形成
本研究では, 同軌道面上の任意のケプラー軌道を周回する複数の宇宙機のコンセンサス問題を考える. 重力場の影響を考慮し, 複数の衛星間の相対状態を一定に保つインパルス分散制御則を設計することで, 中心力場におけるコンセンサス問題の原理を解明するとともに, 高度なミッションへの利用が可能なフォーメーションフライトの枠組みを提案することを目標とする.
目標状態(コンセンサス)の設定
離心率の大きく異なる楕円軌道間の相対軌道は, 特定の規則性を持たない軌道となるため, コンセンサスの定義に工夫が必要である. 本研究では, 二機の宇宙機S1, S2がそれぞれ任意の離心率, 長軸半径の楕円軌道を反時計回りに周回しているケースを考え, 以下2種類の目標(コンセンサス) 状態を形成することを考える. ひとつは2機の宇宙機が長軸の傾きが等しい楕円軌道上を, 常に等しい平均近点角で周回運動する状態. もう一方は, 2機の宇宙機の位置と速度が完全に一致した状態とする.
主結果
平均近点角についてのコンセンサスの形成条件
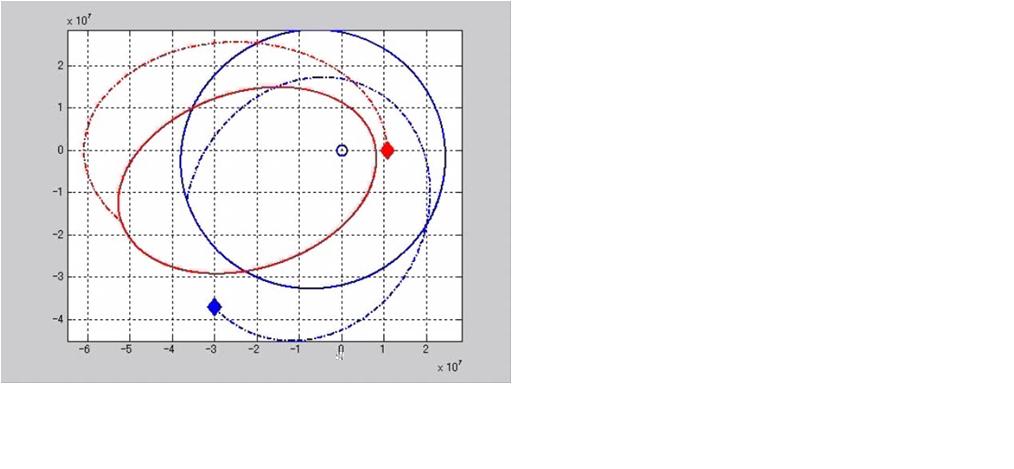
ある時刻において, 地球・S1・S2 が直線上に並んでいるとき, その時刻でのS1, S2の位置が, 入力を加えた後それぞれにとっての新しい近地点(もしくは遠地点)となれば, 入力の前後でシステム全体の地球周りの総角運動量を保ちながら目標のコンセンサスを形成することができる. 本研究では, 地球・S1・S2 が直線上に並ぶ時刻が存在するための条件について解析を行い, S1の半径とS2の長軸半径が異なる場合は常に解が存在することを明らかにした. また, S1とS2の長軸半径が等しい場合では, 初期条件によって解の存在性が異なることがわかった. S1が円軌道を周回する場合については, S2の離心率がある値(およそ0.725)よりも大きい場合は必ず解が存在することを数値実験によって確かめた.
軌道を完全一致させるコンセンサスの形成条件
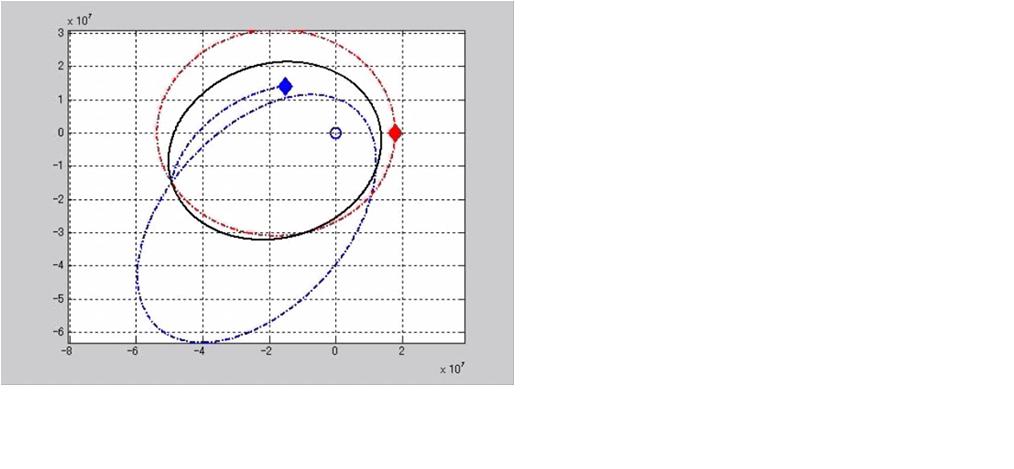
上で定義したコンセンサスのより限定された場合として2機の軌道を完全一致させる場合について考える. 地球を中心として径方向のみに入力を加えることができるという条件下でのランデブー問題を解くことで, 系の総角運動量を保存したままある時刻において2機の位置を合わせることができる. このとき, 先の場合と同様にその時刻でのS1, S2の位置が, 入力を加えた後それぞれにとっての新しい近地点(もしくは遠地点)となるように入力を加えることで, 系の総角運動量を保存したまま, 2機の軌道を完全に一致させることができる.
太陽輻射圧を利用したフォーメーション形成
太陽から飛来する光子が物体の表面に衝突するとき, 太陽輻射圧とよばれる圧力が生じる. 宇宙太陽光発電衛星は大型のミラーを備えているものが多く, 太陽輻射圧が衛星の軌道・姿勢に大きな影響を与える[17]. この太陽輻射圧を単に外乱として抑制するのではなく, うまく活用しようとするアプローチを総称してSolar Sailという. 文献[18]のように, 軌道面の移行に太陽輻射圧を活用する研究や, 文献[19,20]のように姿勢制御に利用する研究も行われている. また, 文献[21]のようにフォーメーション形成に太陽輻射圧を活用する研究例も存在する. 本研究では, 太陽輻射圧を利用して宇宙太陽光発電に有用なフォーメーションを形成することを目指す.
Reference
[1] 篠原真毅, "宇宙太陽発電所SSPSによる生存圏の持続的な発展に向けて,'' 生存圏研究, vol. 1, no. 1, pp. 22-28, 2006.
[2] M. Mori, H. Kagawa, and Y. Saito, "Summary of studies on space solar power systems of Japan Aerospace Exploration Agency (JAXA),'' Acta Astronautica, vol. 61, no. 1-5, pp. 132-138, 2006.
[3] N. Takeichi, H. Ueno, and M. Oda, "Feasibility study of a solar power satellite system configured by formation flying,'' Acta Astronautica, vol. 57, no. 9, pp. 698-706, 2005.
[4] SCOPE WG(http://www.stp.isas.jaxa.jp/scope/index.html)
[5] J. Ramirez and S. Chakravorty, "Near-minimum fuel trajectories for multi spacecraft interferometric imaging systems in near-earth orbit,'' in Proc. IEEE Conf. Dec. Contr., (San Diego, CA), pp. 6796-6801, Dec. 2006. vol. 57, no. 9, pp. 698-706, 2005.
[6] 原, 堀, 金 "循環的追跡法に基づく協調捕獲行動のためのフォーメーション制御'' 計測自動制御学会論文集, vol. 45, no. 3, pp. 160-167, 2009.
[7] H. G. Tanner, A. Jadbabaie, and G. J. Pappas, "Stable flocking of mobile agents, Part I: Fixed Topology'' in Proc. IEEE Conf. Dec. Contr., (Manui, HI), pp. 2010-2015, Dec. 2003.
[8] T. Hayakawa and G. Mohanarajah, "Attitude consensus with fixed rotational axis via energy dissipation,'' in Proc. IEEE Conf. Dec. Contr., (Cancun, Mexico), pp. 2932-2937, December 2008.
[9] 冨田信之, 宇宙システム入門, 東京大学出版, 1993.
[10] G. Inalhan, "Relative dynamics and control of spacecraft formations in eccentric orbits'' AIAA J. Guid. Contr. Dyn,, vol. 25, no. 1, pp. 48-60, 2002.
[11] F. Jiang, J. Li, H. Baoyin, and Y. Gao, "Study on relative orbit geometry of spacecraft formations in elliptical reference orbit,'' AIAA J. Guid. Contr. Dyn,, vol. 31, no. 1, pp. 123-134, 2008.
[12] H. Shen and P. Tsiotras, "Optimai two-impulse rendezvous using multiple-revolution lambert solutions,'' AIAA J. Guid. Contr. Dyn,, vol. 26, no. 1, pp. 50-61, 2003.
[13] W. E. Wiesel, "Optimai impulsive control of relative satellite motion,'' AIAA J. Guid. Contr. Dyn,, vol. 26, no. 1, pp. 74-78, 2003.
[14] H. Schaub and K. T. Alfriend, "Impulsive feedback control to establish specific mean orbit elements of spacecraft formations,'' AIAA J. Guid. Contr. Dyn,, vol. 24, no. 4, pp. 739-745, 2001.
[15] 山田, 吉河, 島, 軸屋 "宇宙機フォーメーションの2インパルスによる相対位置の変更,'' 日本機械学会論文集(C編), vol. 72, no. 722, pp. 285-293, 2006.
[16] 横山, 山田, 軸屋 "宇宙機フォーメーションの2インパルスによる相対位置の変更(第2報, フォーメーションサイズを小さくする場合),'' 日本機械学会論文集(C編), vol. 74, no. 737, pp. 44-51, 2008.